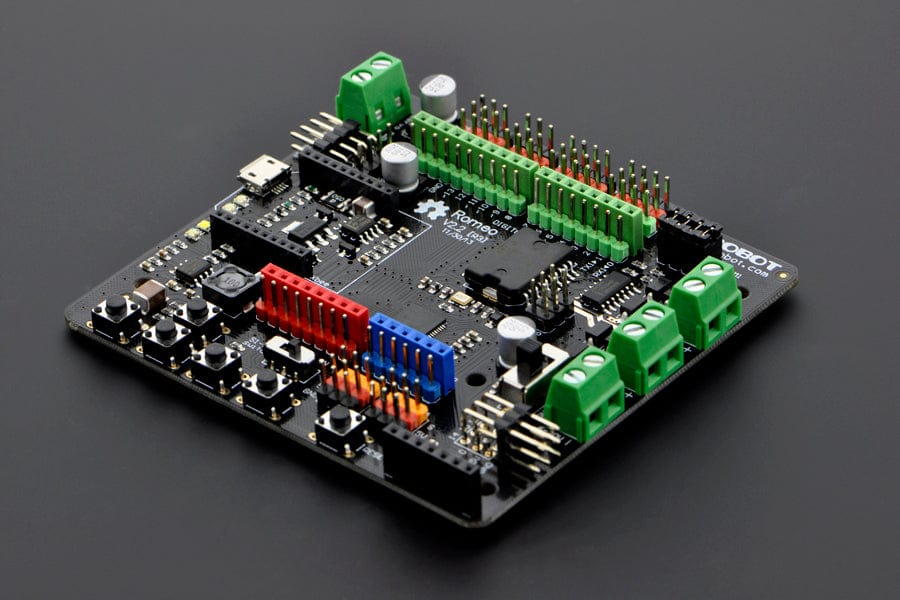
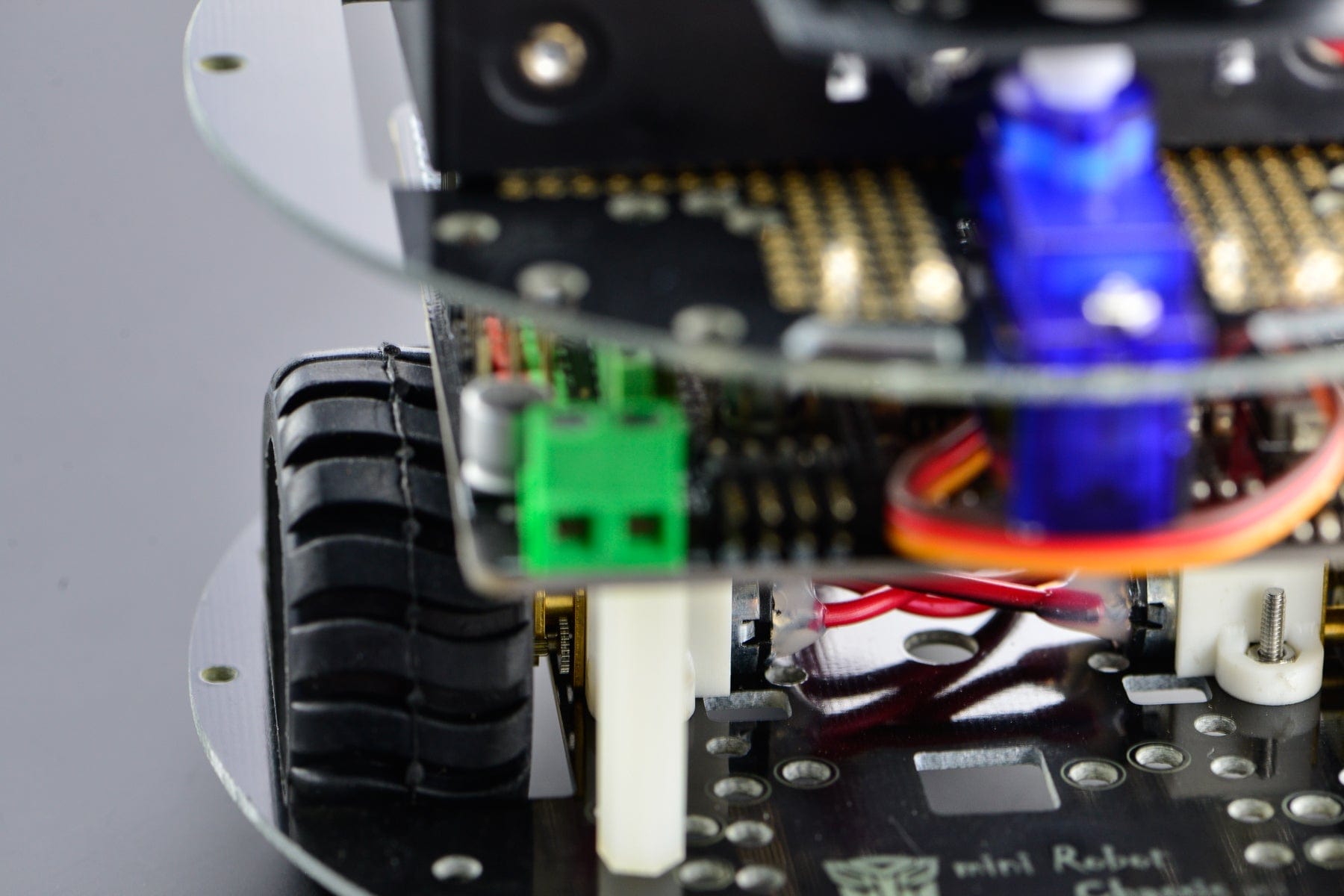
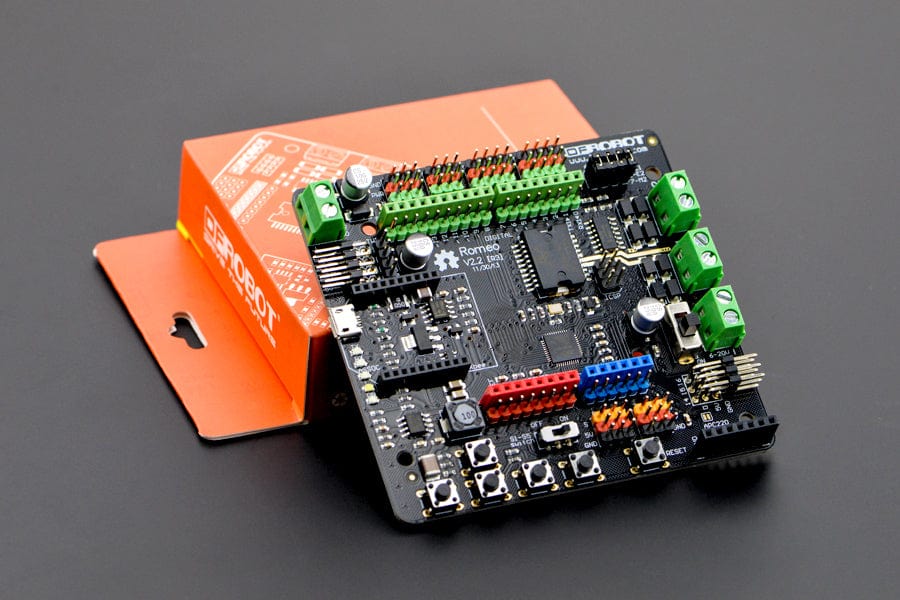
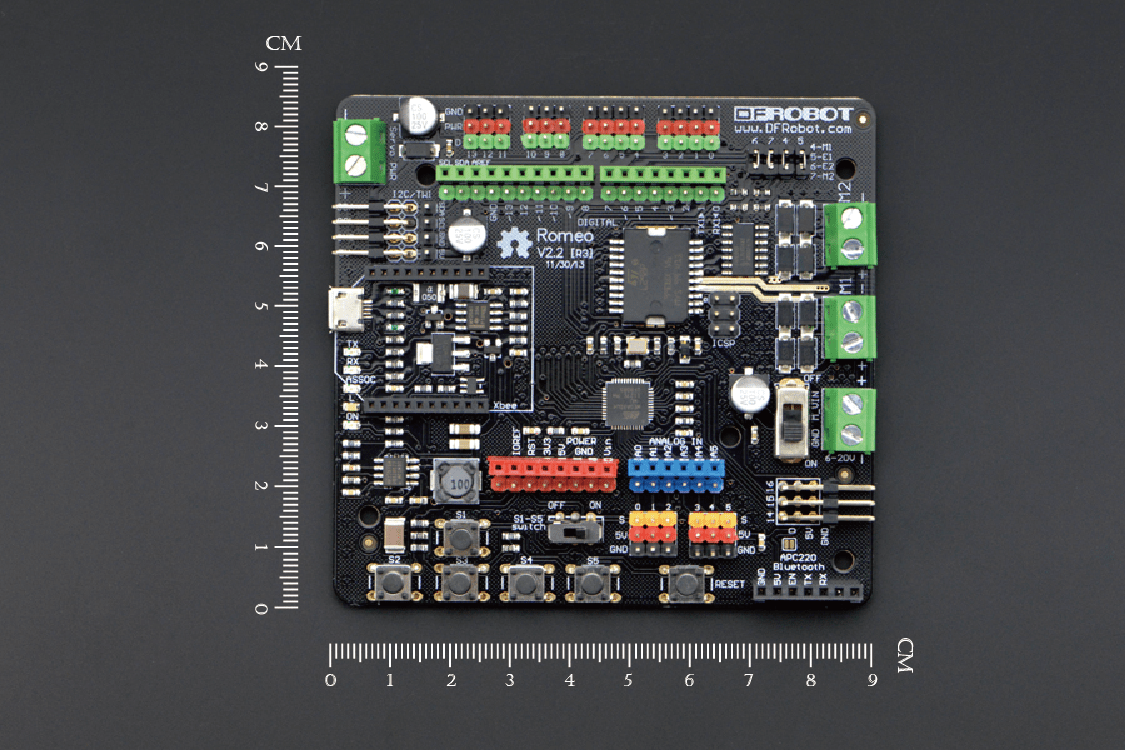
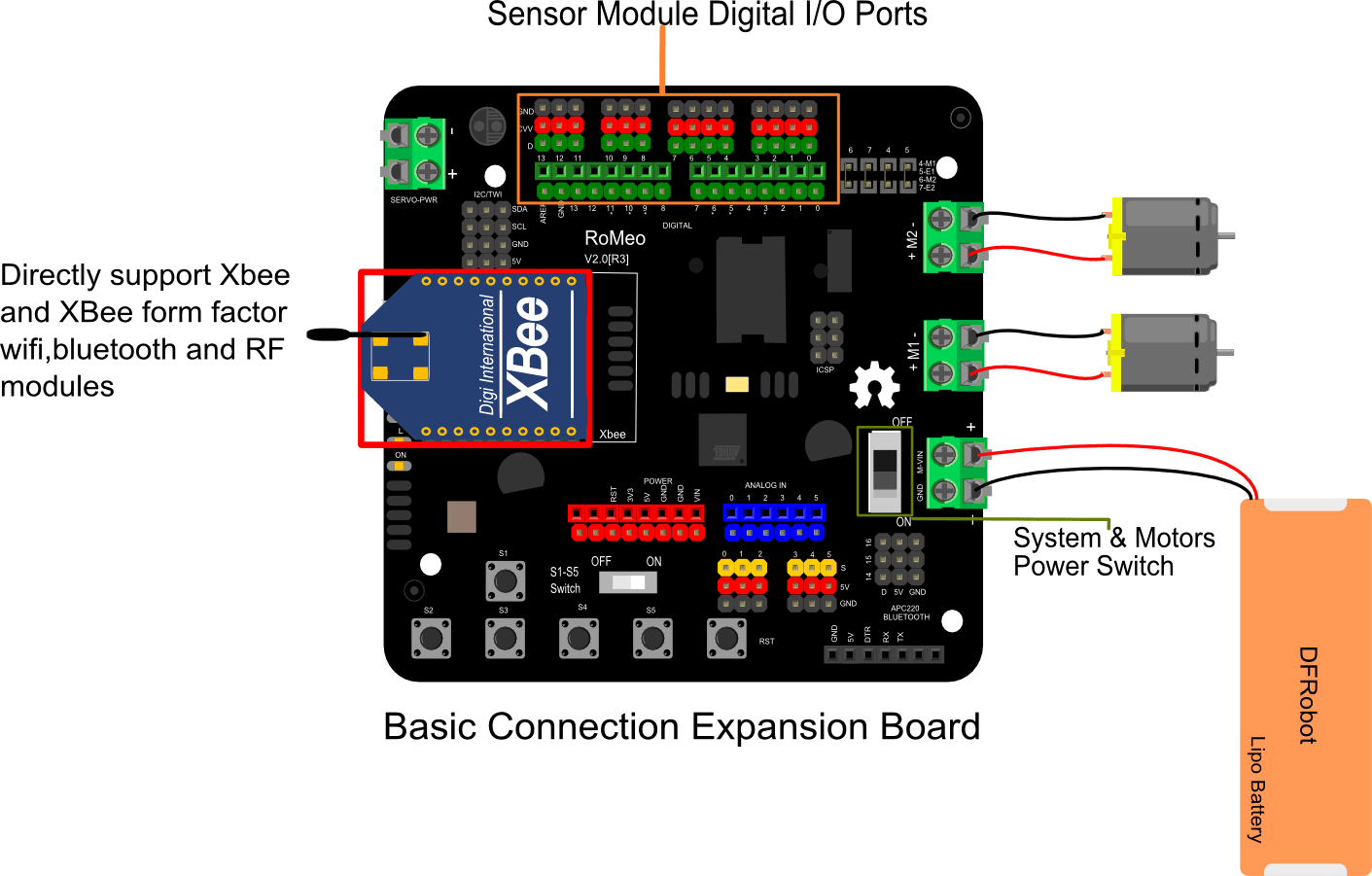
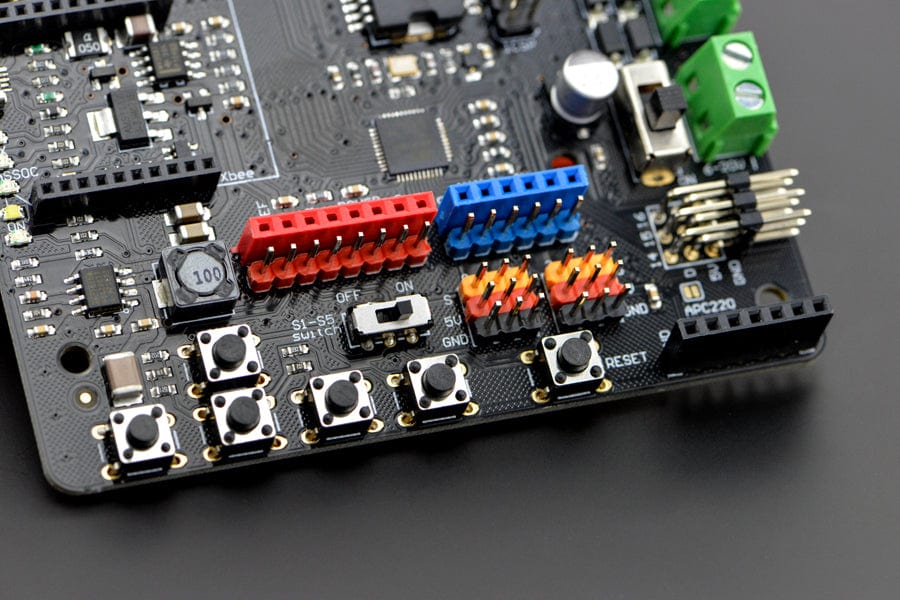
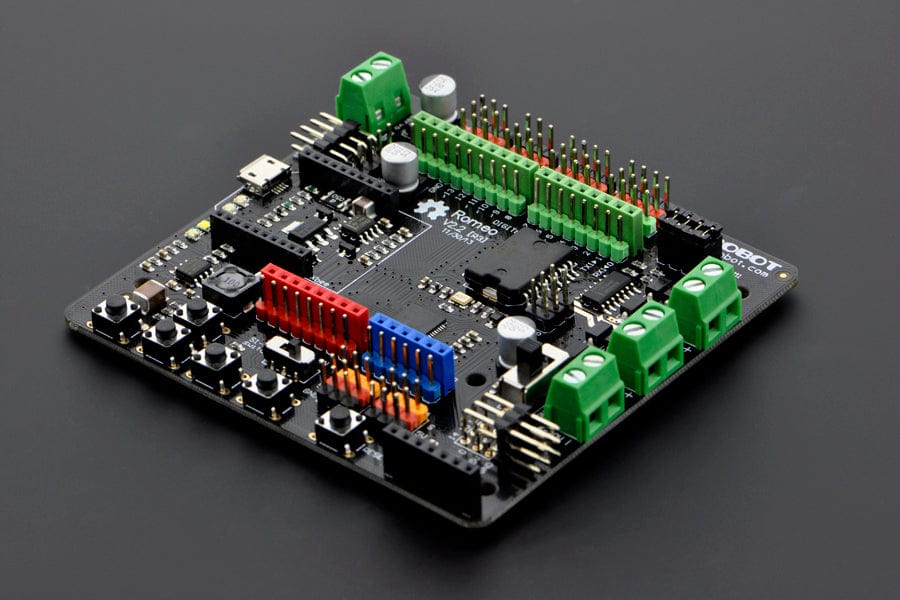
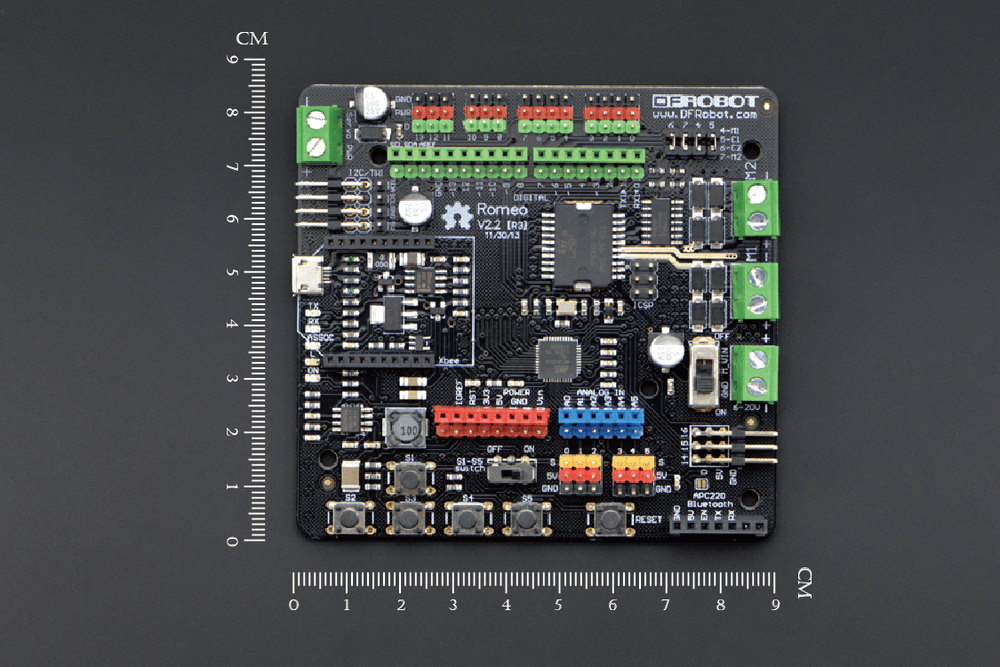
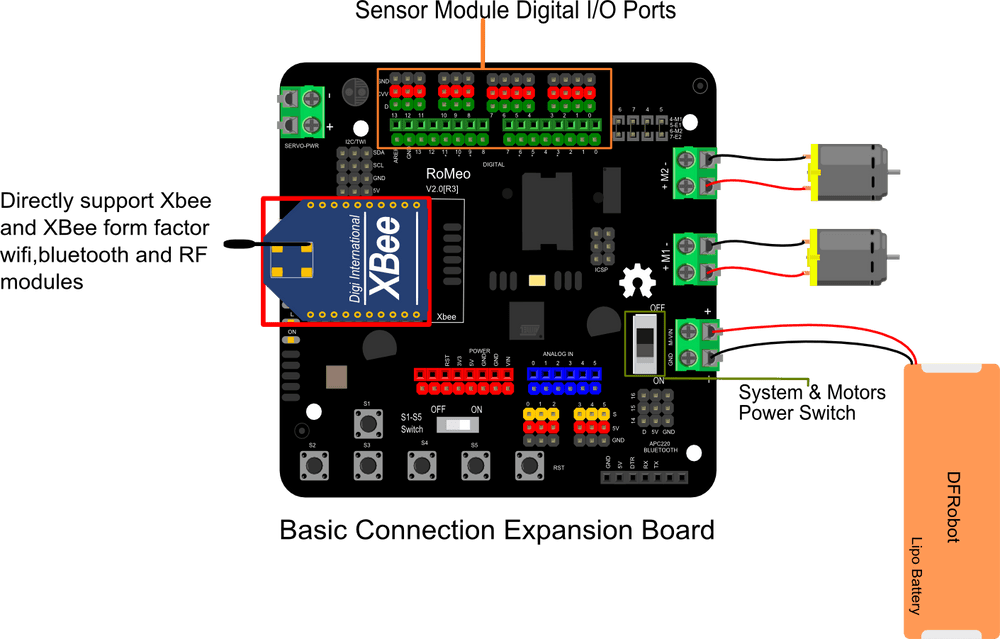
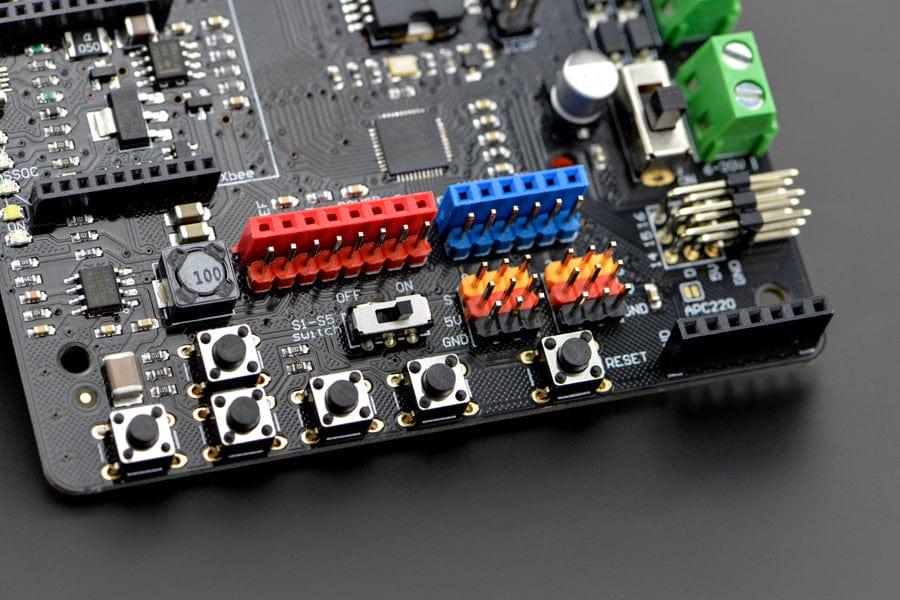
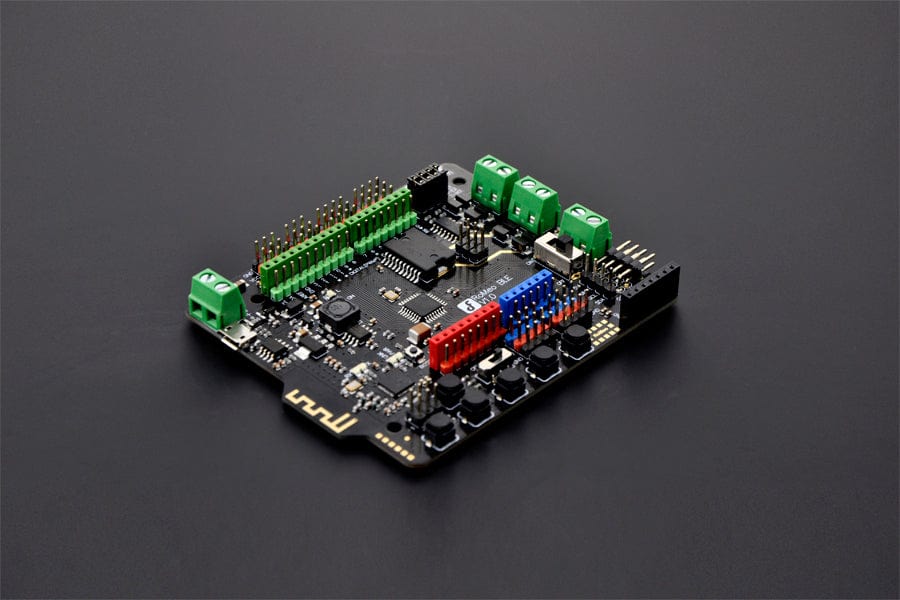
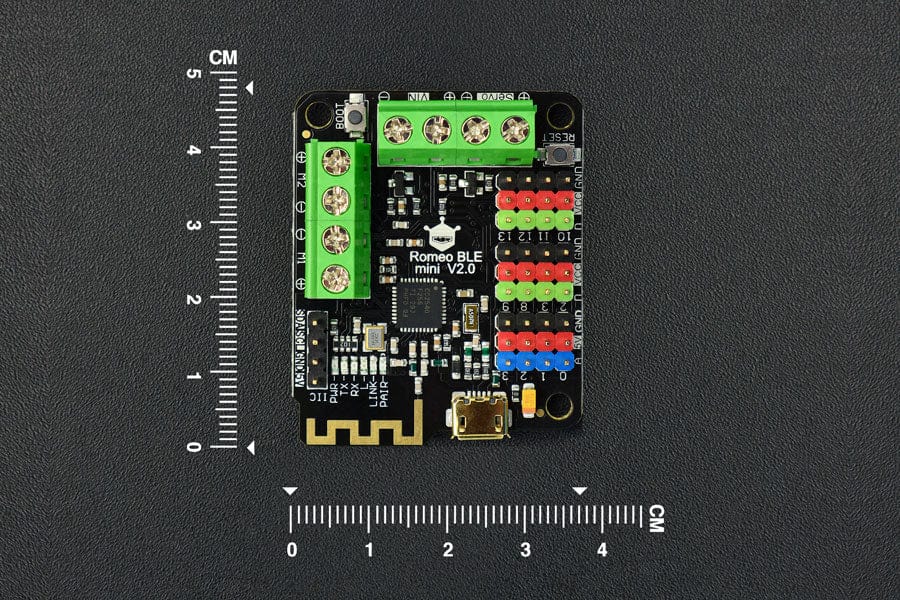
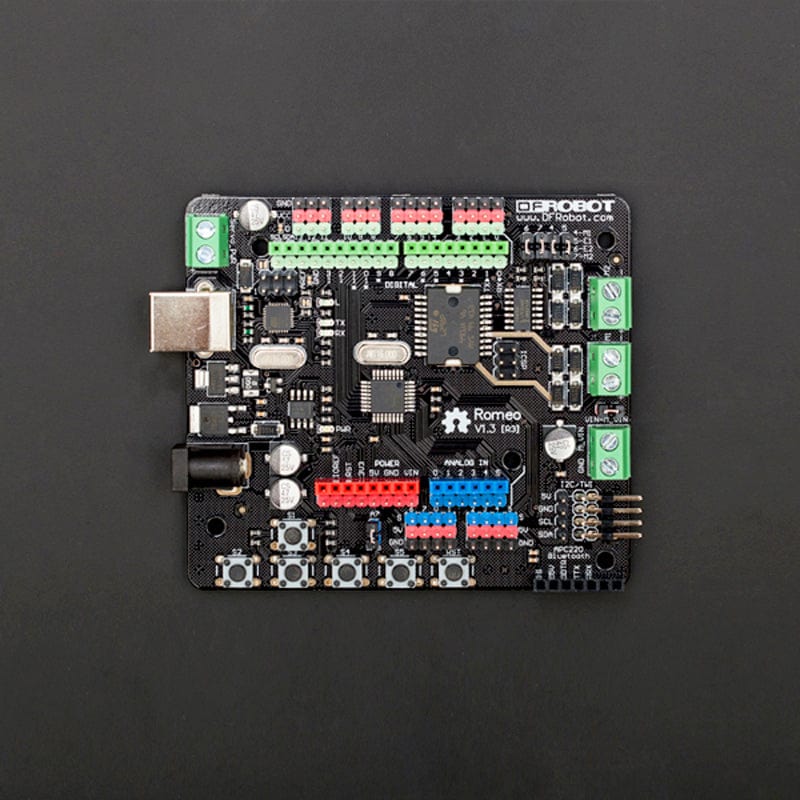
Romeo V2 - a Robot Control Board with Motor Driver (Arduino Compatible)
Price:
Sale price
£25.90
Stock:
Quantity:
Login / Signup
Cart
Your cart is empty

| DFRobot Microcontroller Selection Guide | ||||||||
| Picture |
*For IoT developers.
|
|||||||
Your payment information is processed securely. We do not store credit card details nor have access to your credit card information.