Micro Metal Motor Encoder (MMME) (pack of 2)
Option:Regular
Price:
Sale price
£7.50
Stock:
Quantity:
Login / Signup
Cart
Your cart is empty
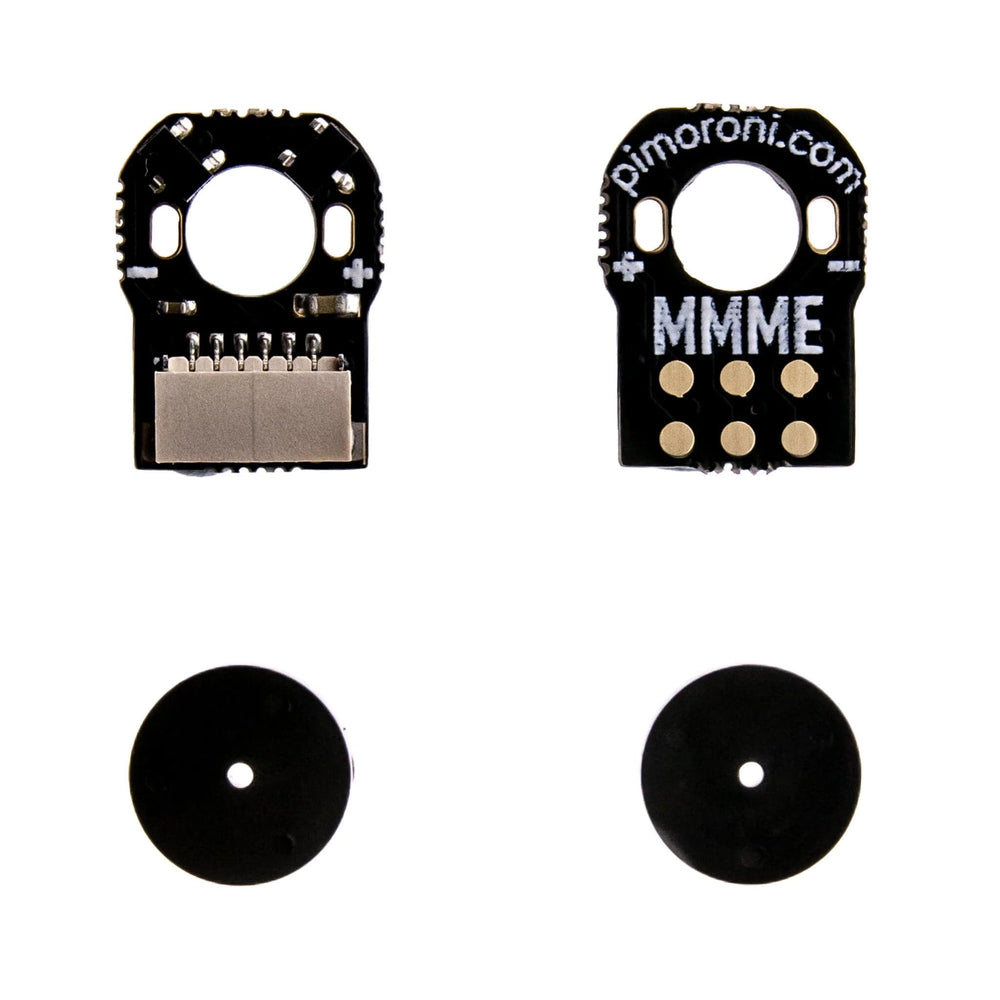
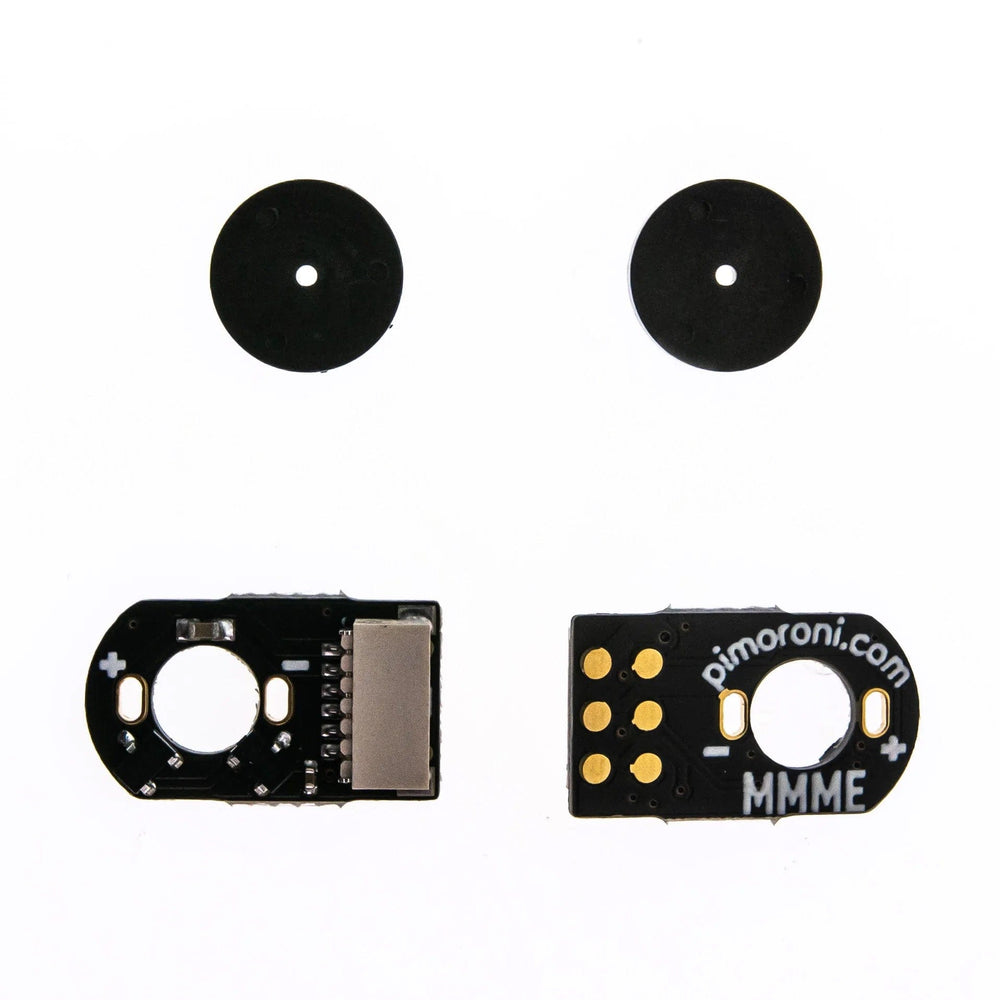




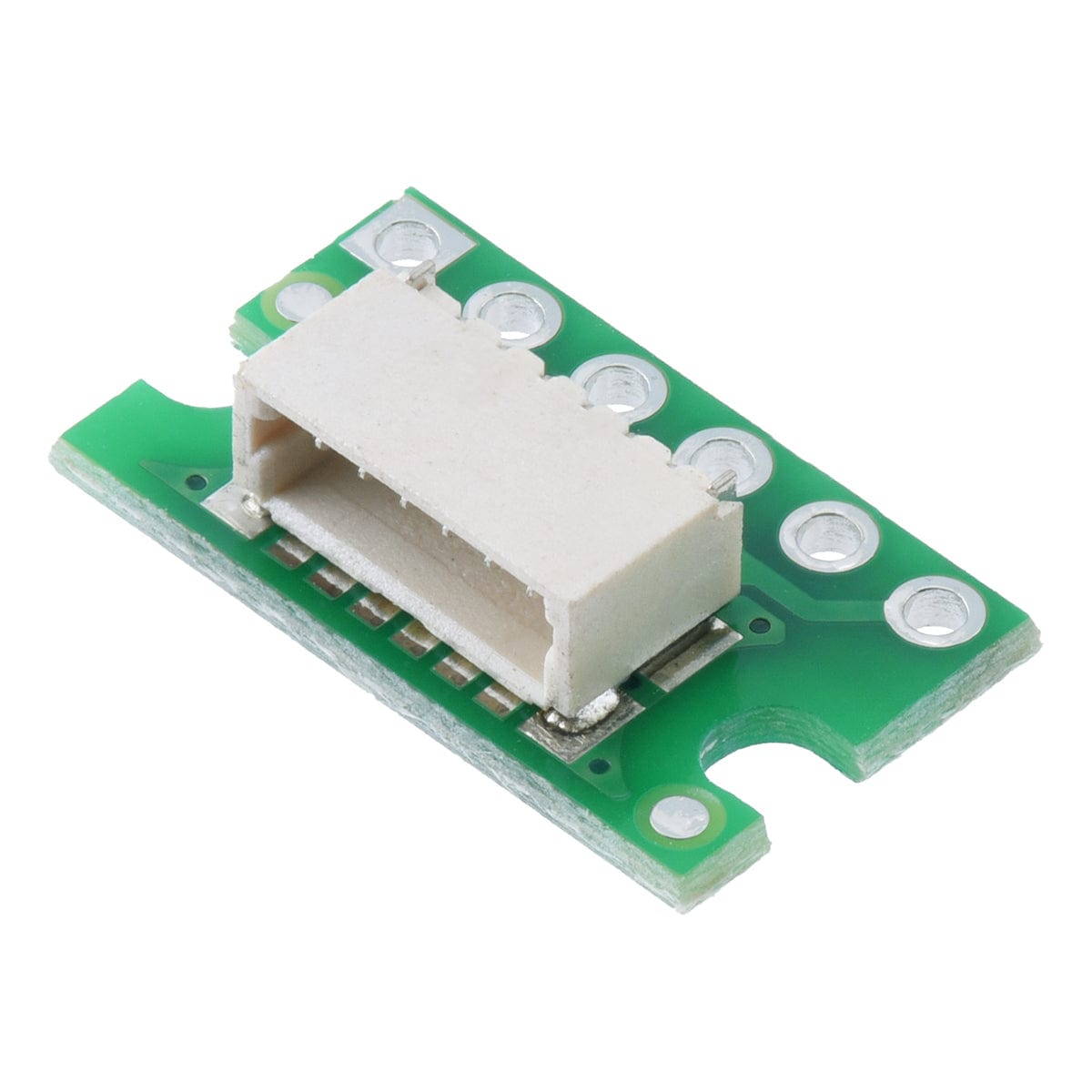
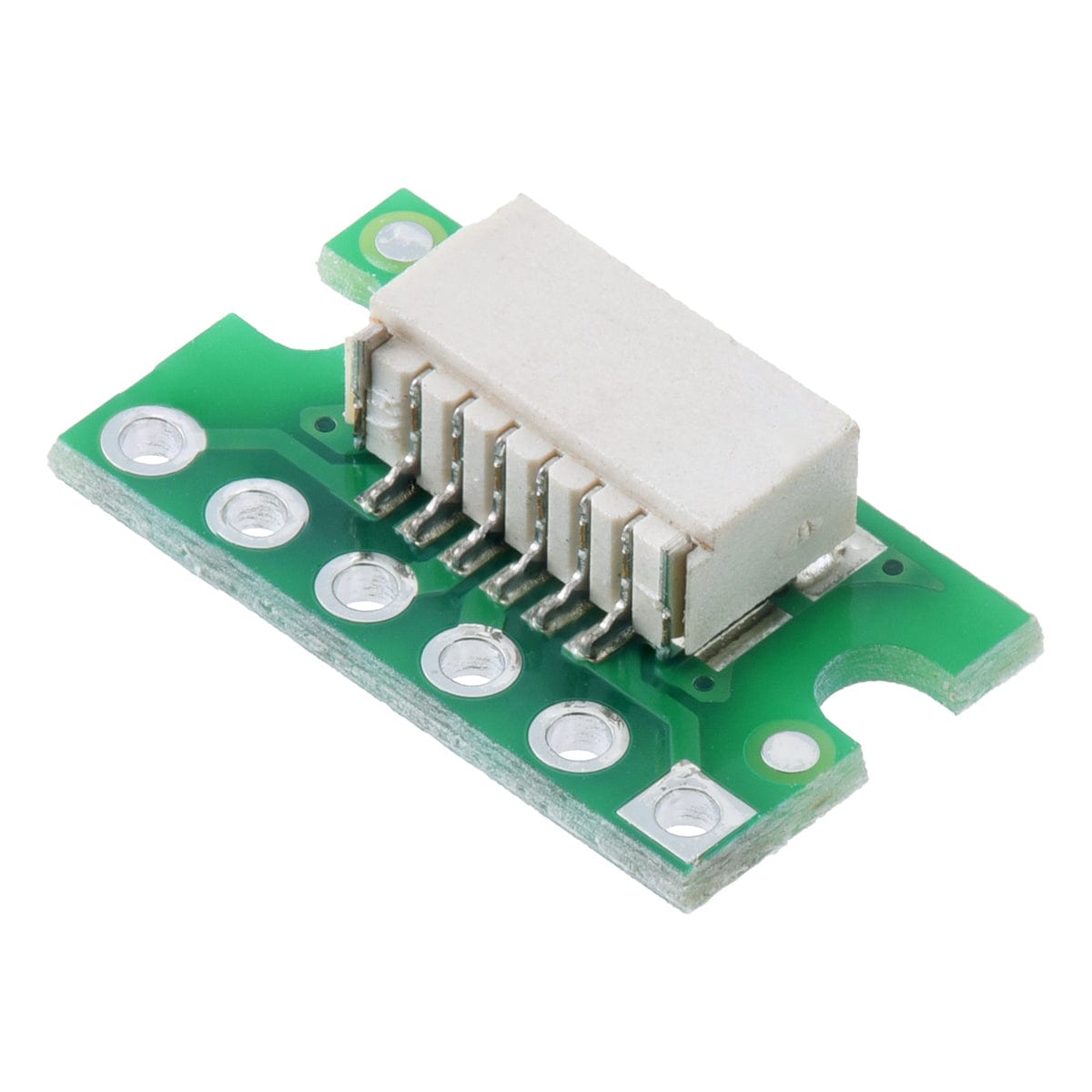
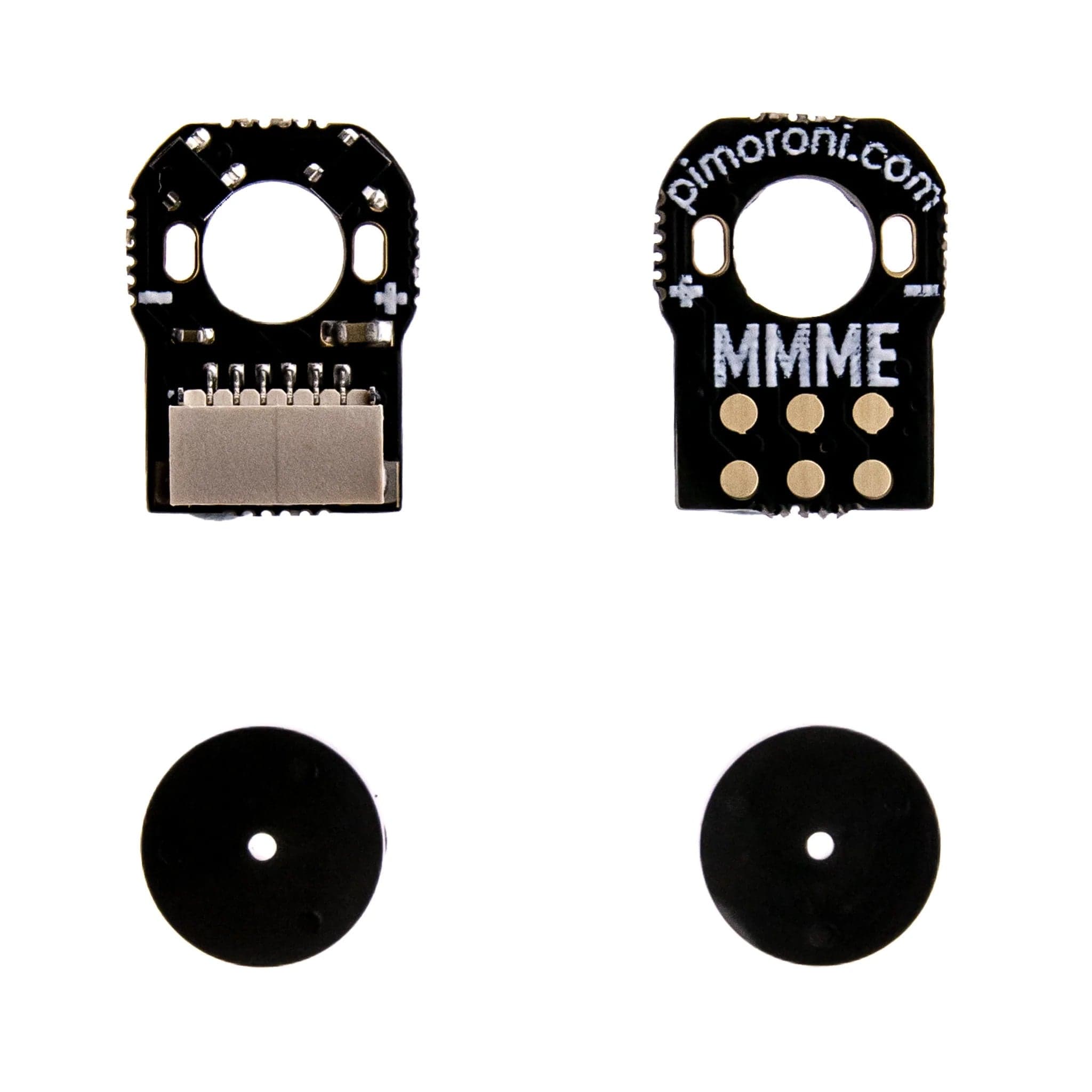
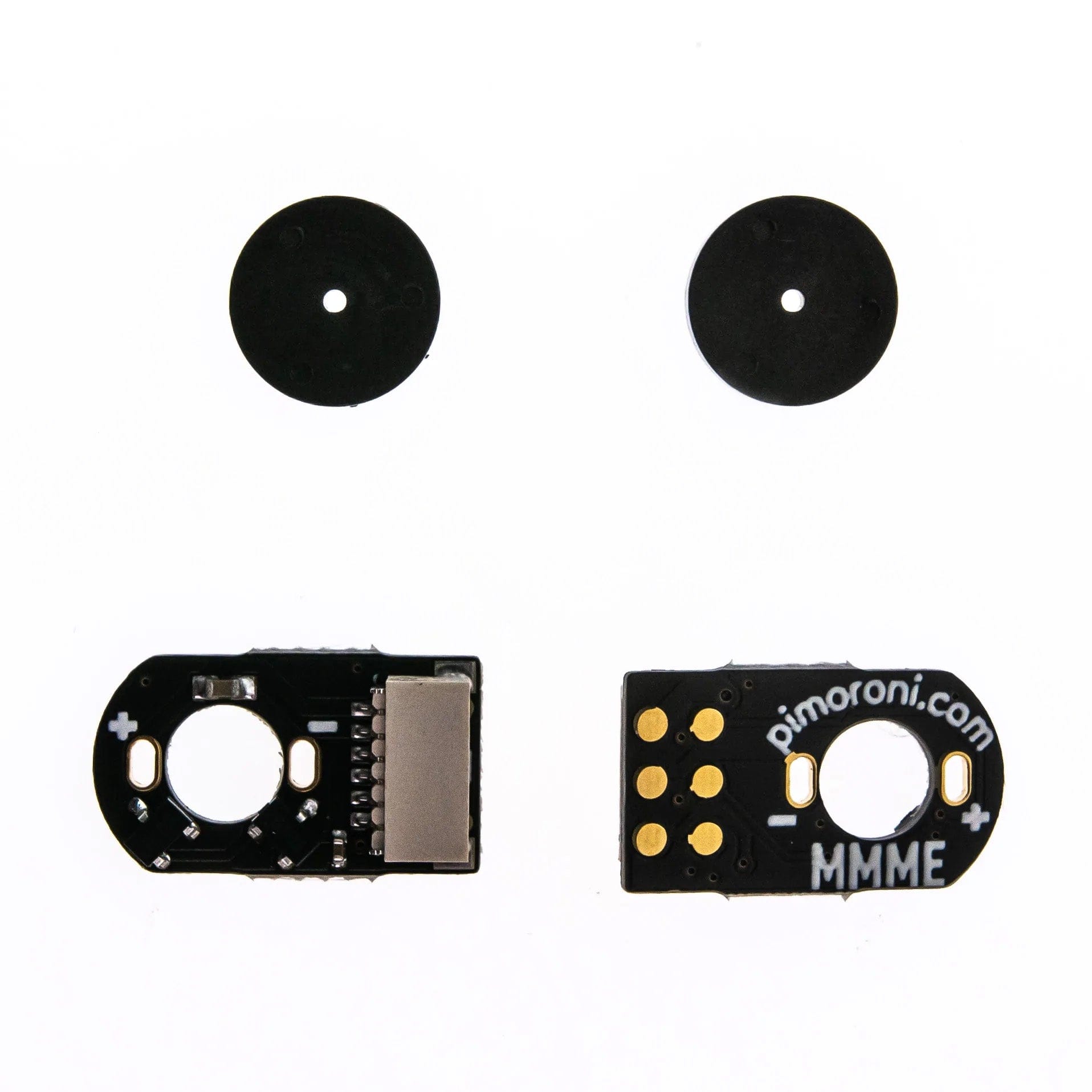
Add this shim and magnetic disc to your micro metal gearmotor to upgrade it into a super smart encoder motor, available in regular or sideways configuration (select option before adding to cart).
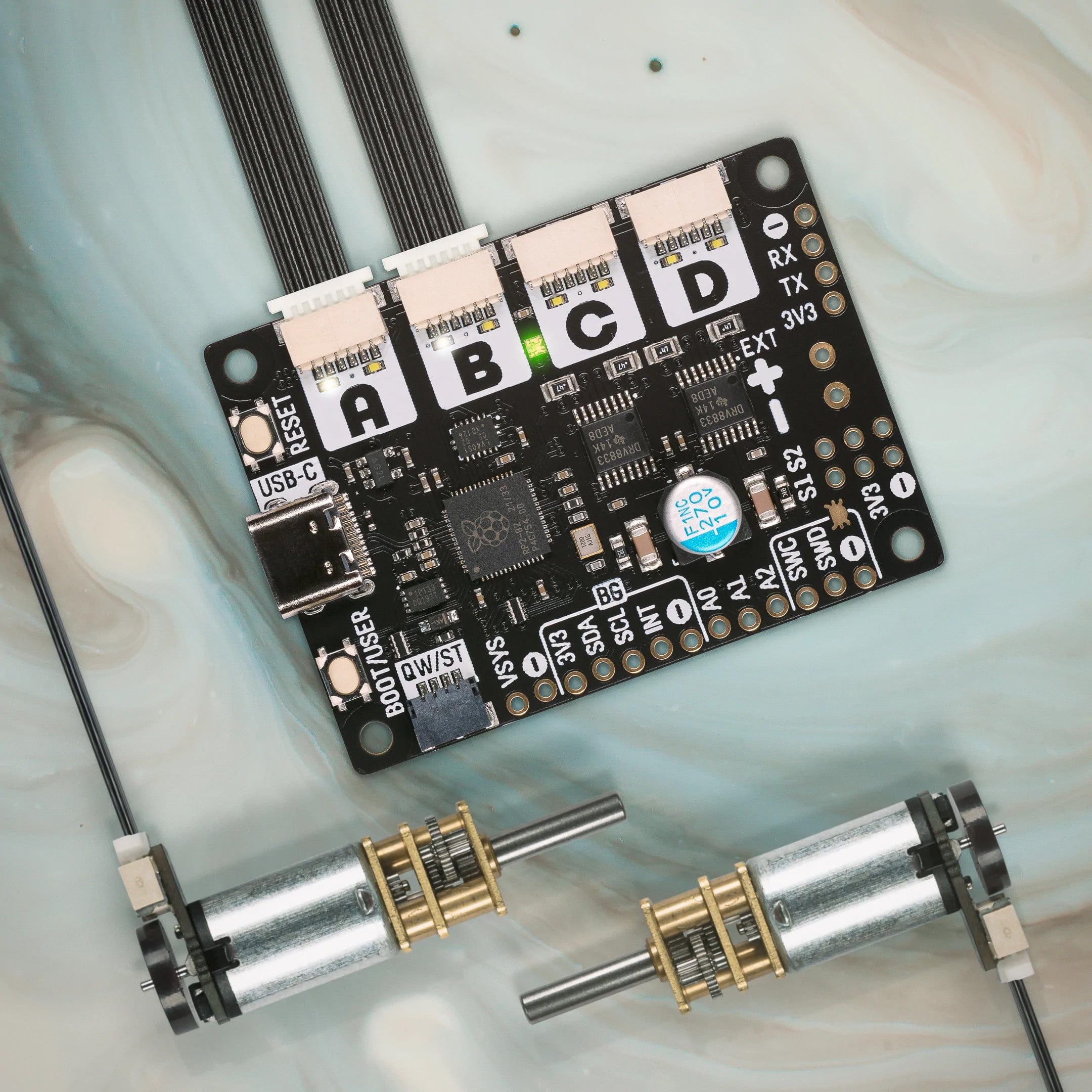
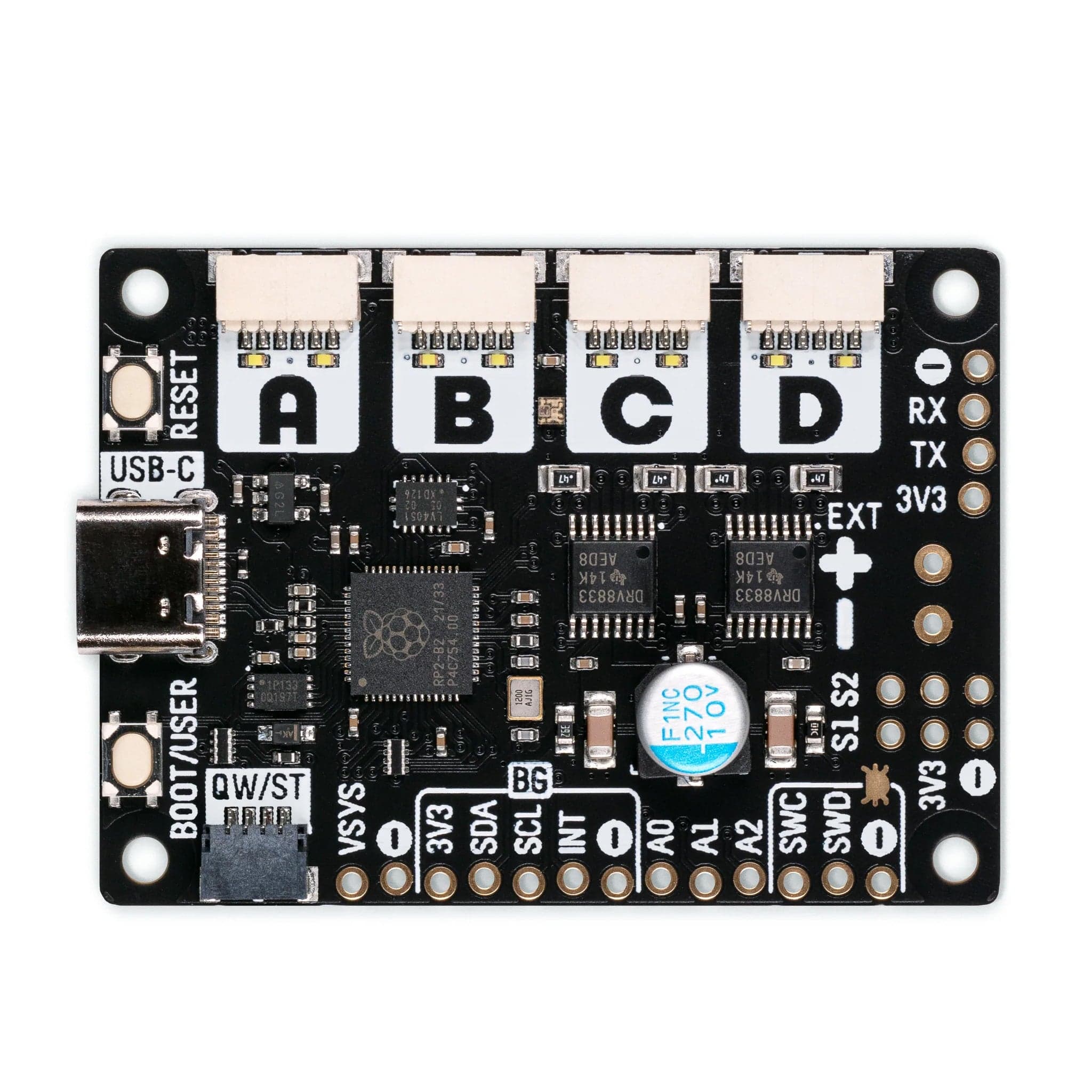
Solder this board to the back of a micro metal gearmotor (you'll need a motor with a thin rear spindle), push the magnetic disc onto the end of the motor shaft and tada - you have yourself a quadrature encoder motor, which uses Hall Effect sensors and magnetic discs to provide your microcontroller with feedback on how fast and how much your motor is moving.
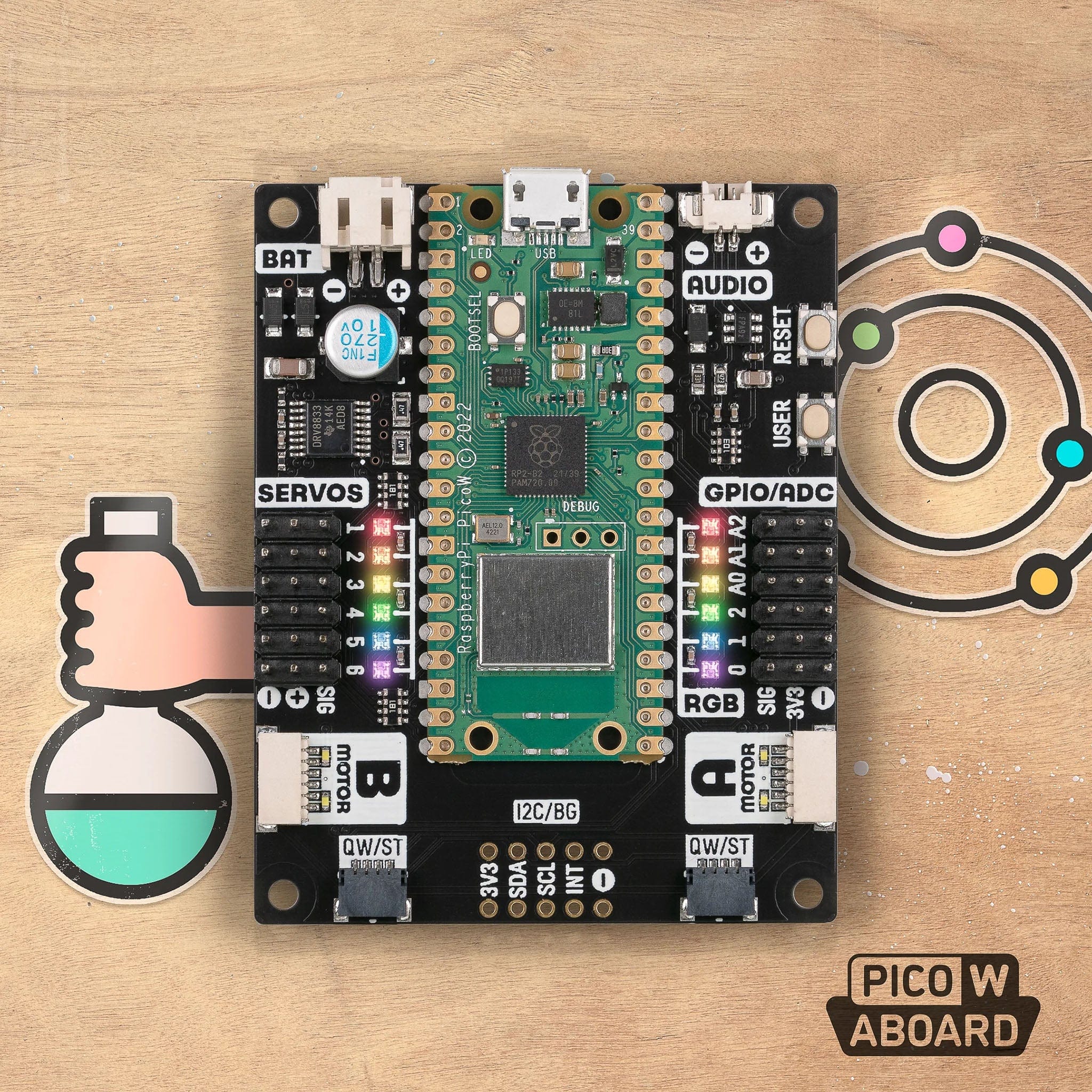
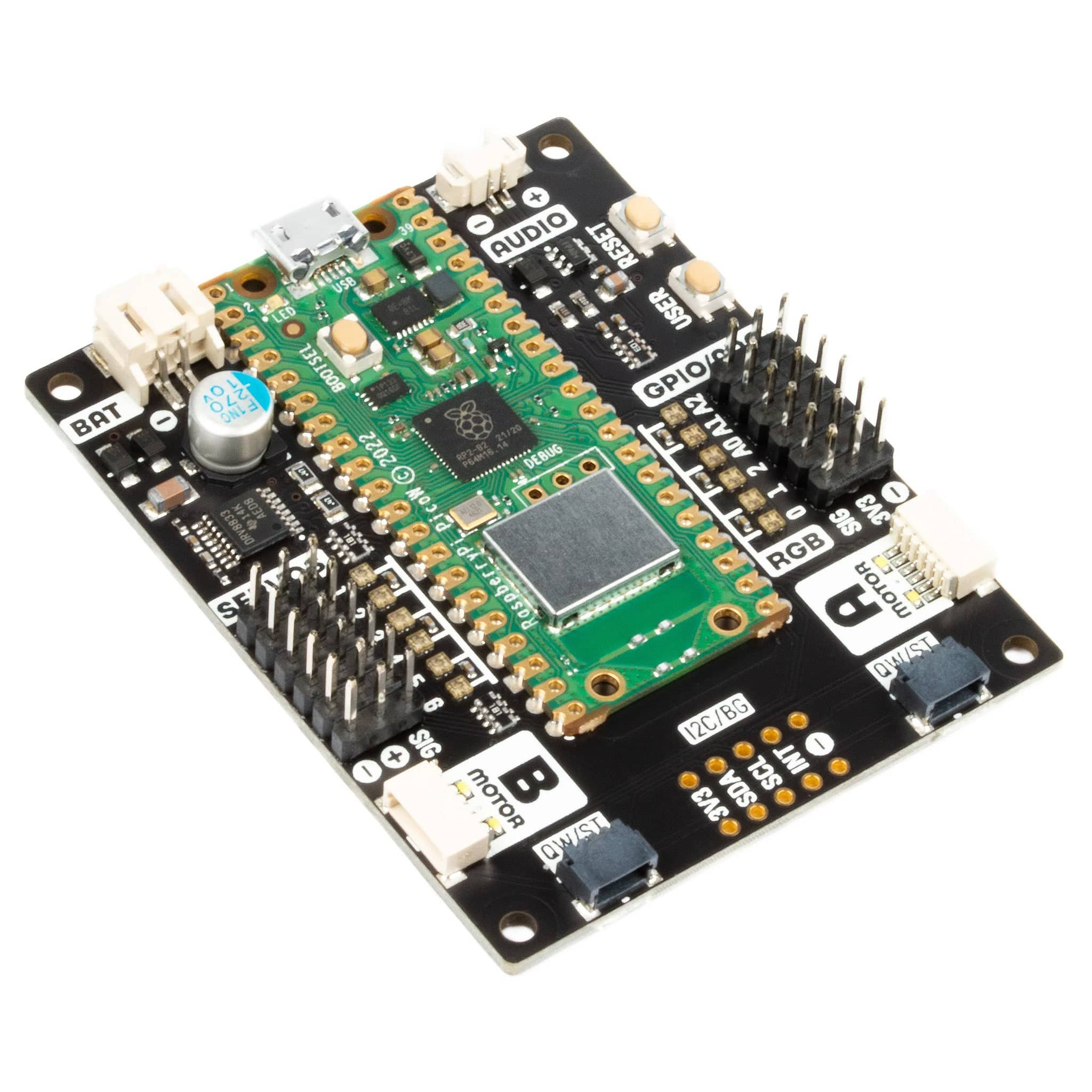
Once your motor has this MMME apparatus attached, you can connect it up to a controller board like Motor 2040 or Inventor 2040 W using a convenient 6-pin JST cable. Using cables to connect up your motors means they're easy to incorporate into your robotics designs, and straightforward to connect/disconnect if you need to swap out your motors for ones with different gear ratios.
Don't want to solder? You can also buy micro metal gearmotors with MMME pre-attached!
Motors and cables are not included
Your payment information is processed securely. We do not store credit card details nor have access to your credit card information.