Motor 2040 - Quad Motor Controller
Price:
Sale price
£24
Stock:
Login / Signup
Cart
Your cart is empty
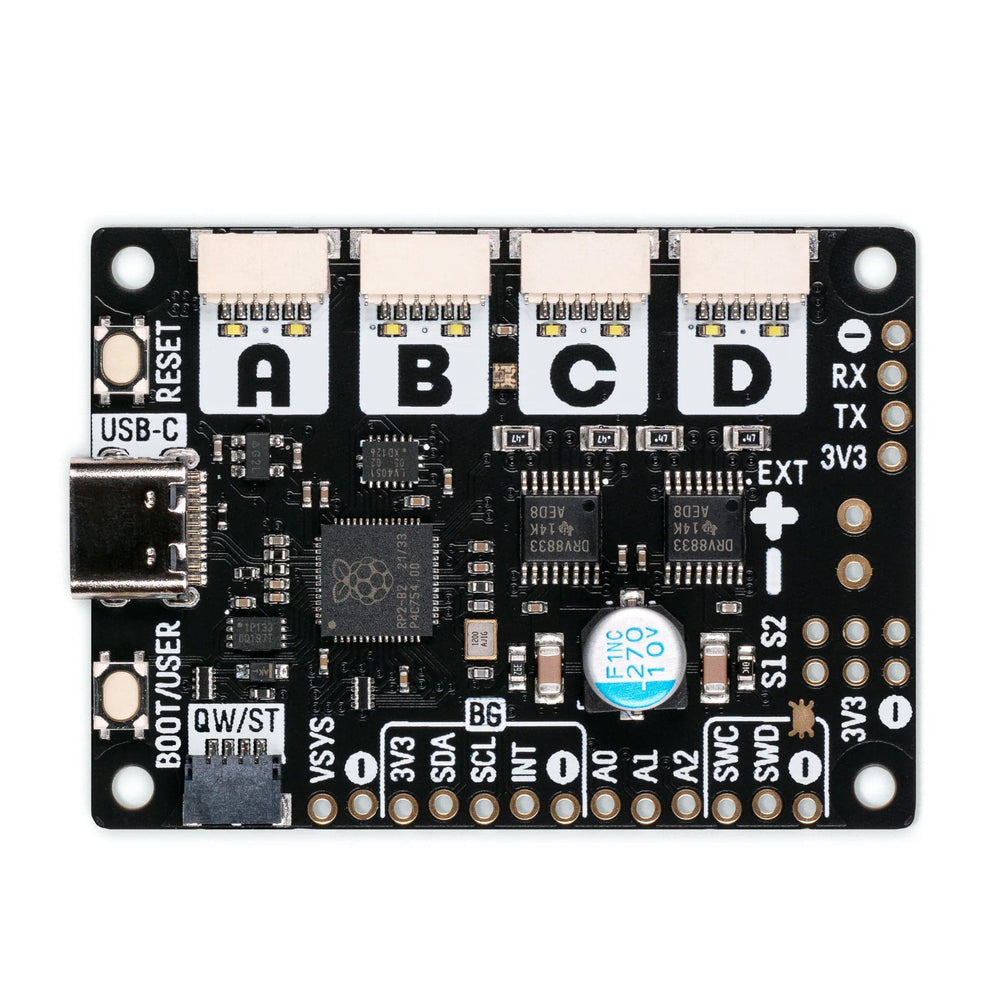







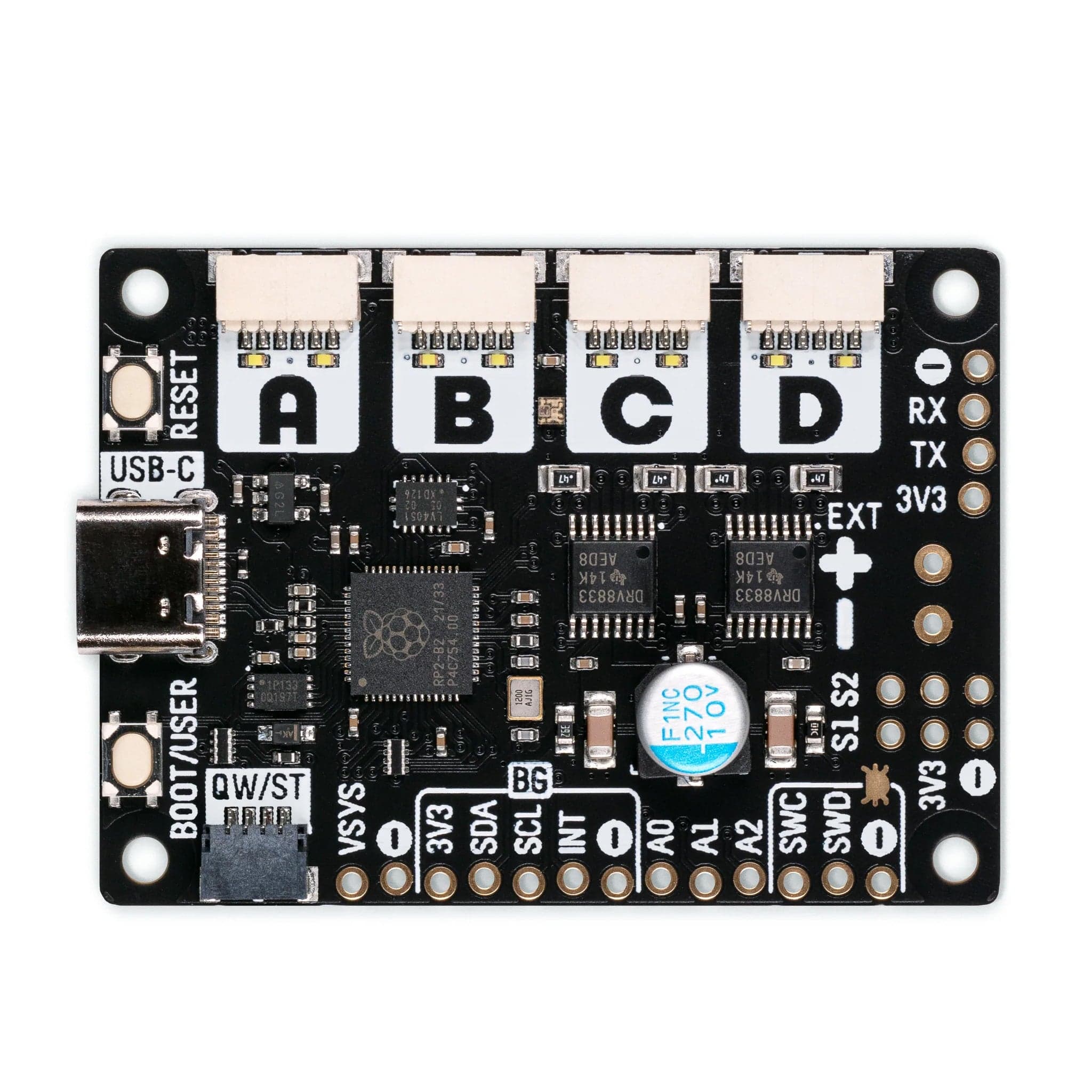
A compact 4-channel motor+encoder controller, powered by RP2040. It has RGB and per-motor indicator LEDs plus built-in voltage and current sensing.
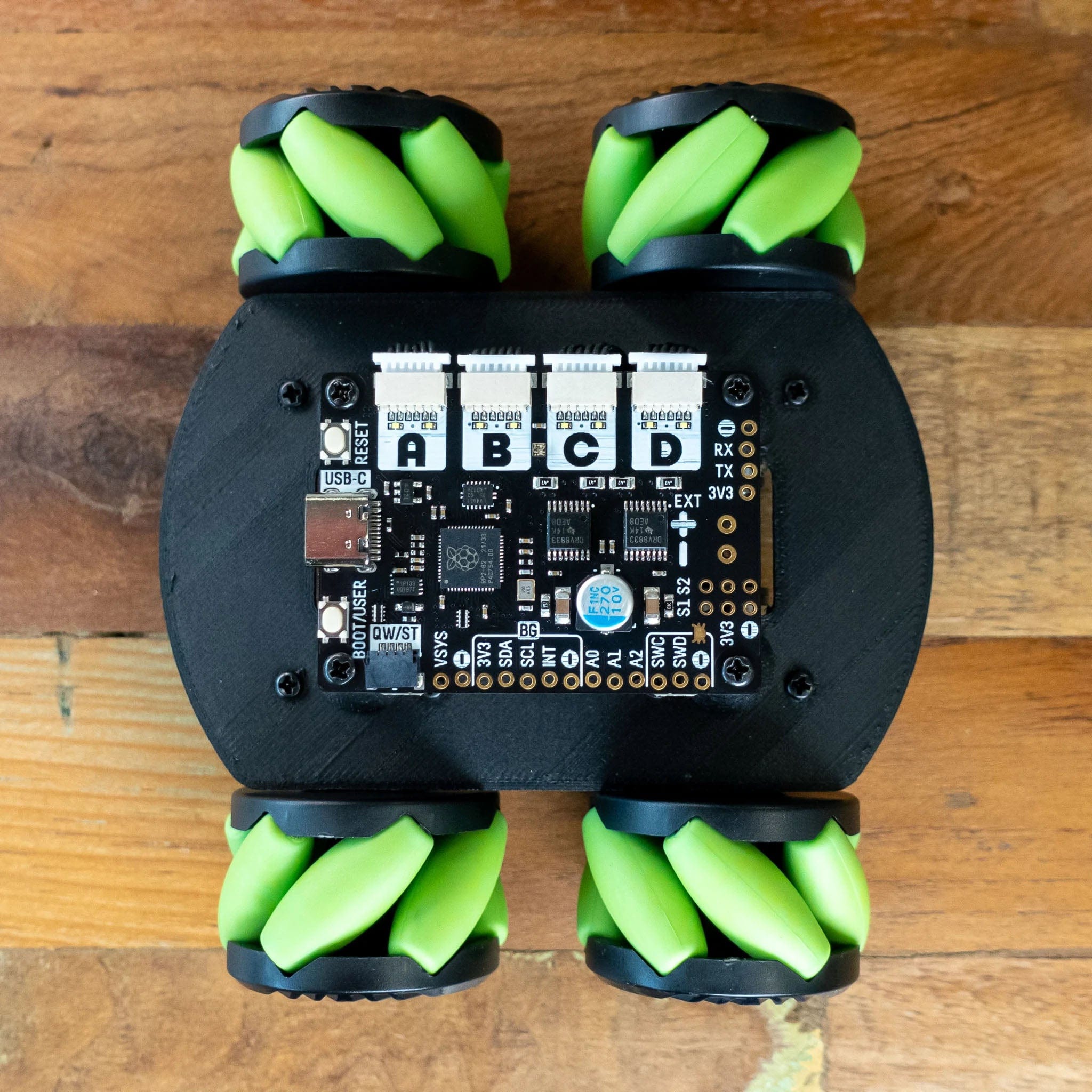
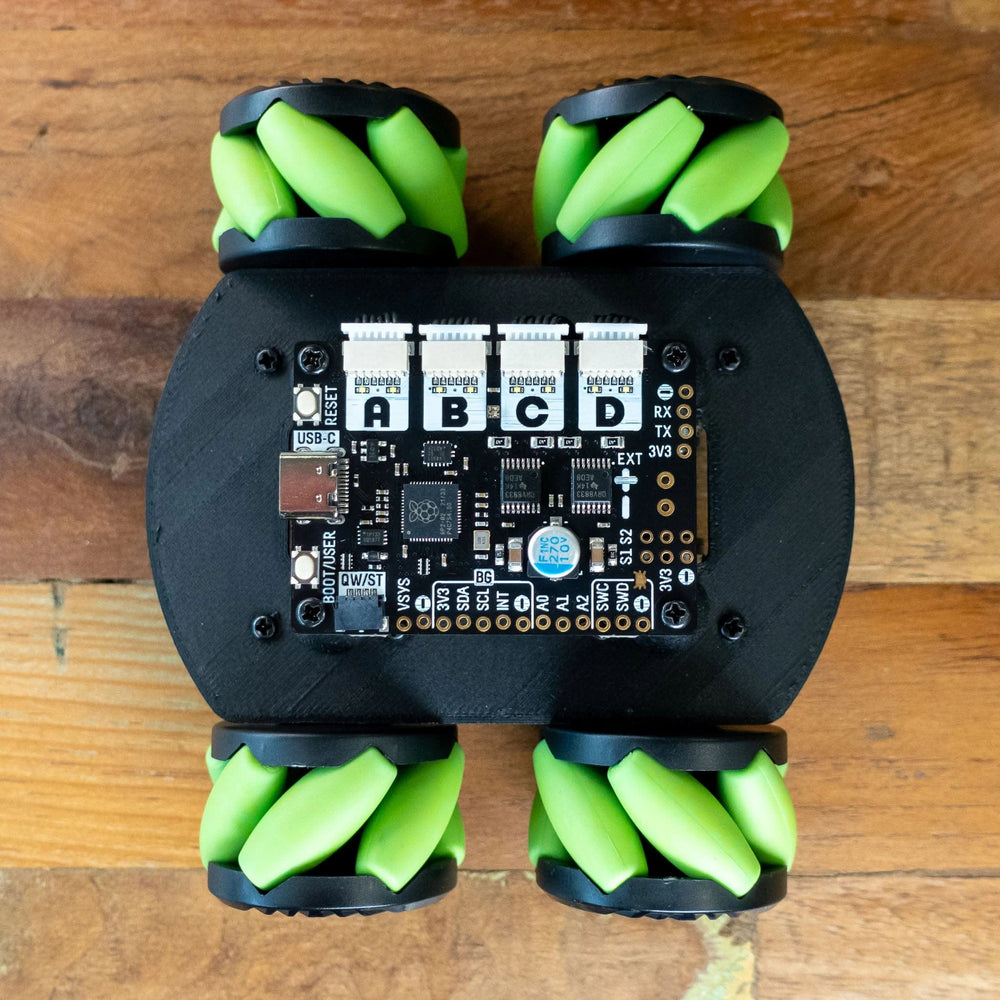
Motor 2040 is a standalone motor controller for driving motors with encoders attached. Encoder motors can provide feedback to the controller, enabling more precise control over position and velocity - perfect for building a four-wheel drive robot rover or buggy (add mecanum omniwheels to go sideways!). We've built the RP2040 chip right into Motor 2040 so you don't need separate microcontroller and driver boards, keeping everything tidy and lightweight.
Why limit yourself to vehicular constructs though, you could use it as the brains of any project that involves motors: elaborate pulley systems, 1:12 replicas of It's A Small World or even customisable dials with haptic feedback and programmable endpoints.
Motor 2040 comes with many useful built-in bells and whistles, such as:
It's supported by a well-documented C++/MicroPython motor and encoder library with lots of examples to show you how to use the individual features (and everything together).
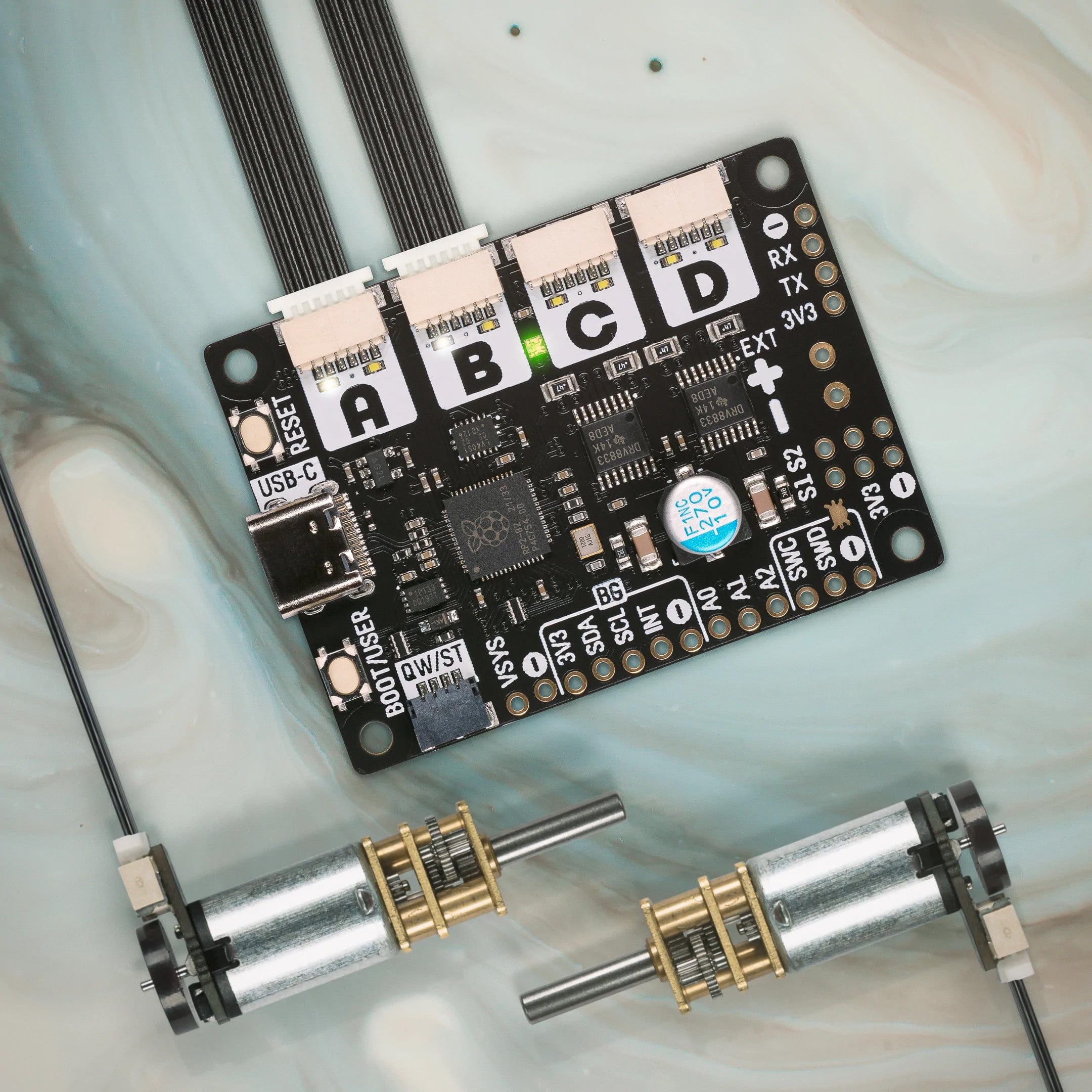
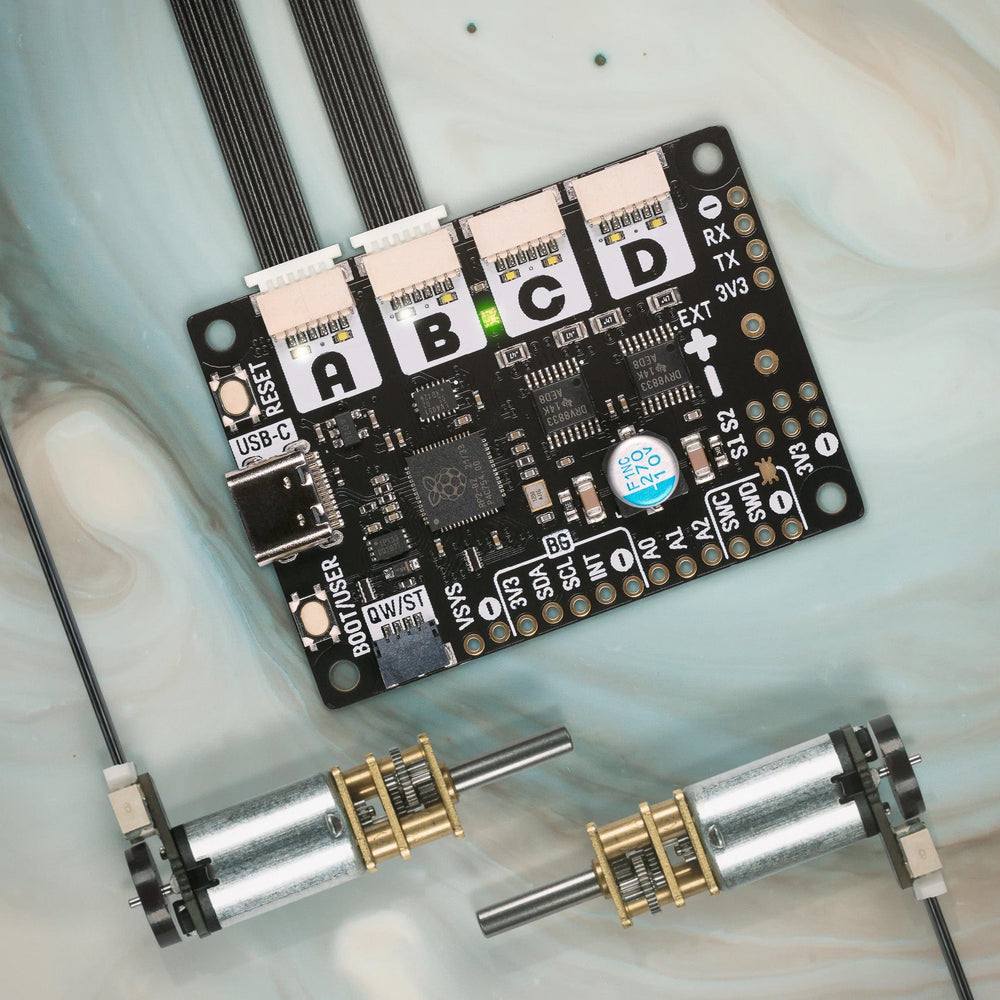
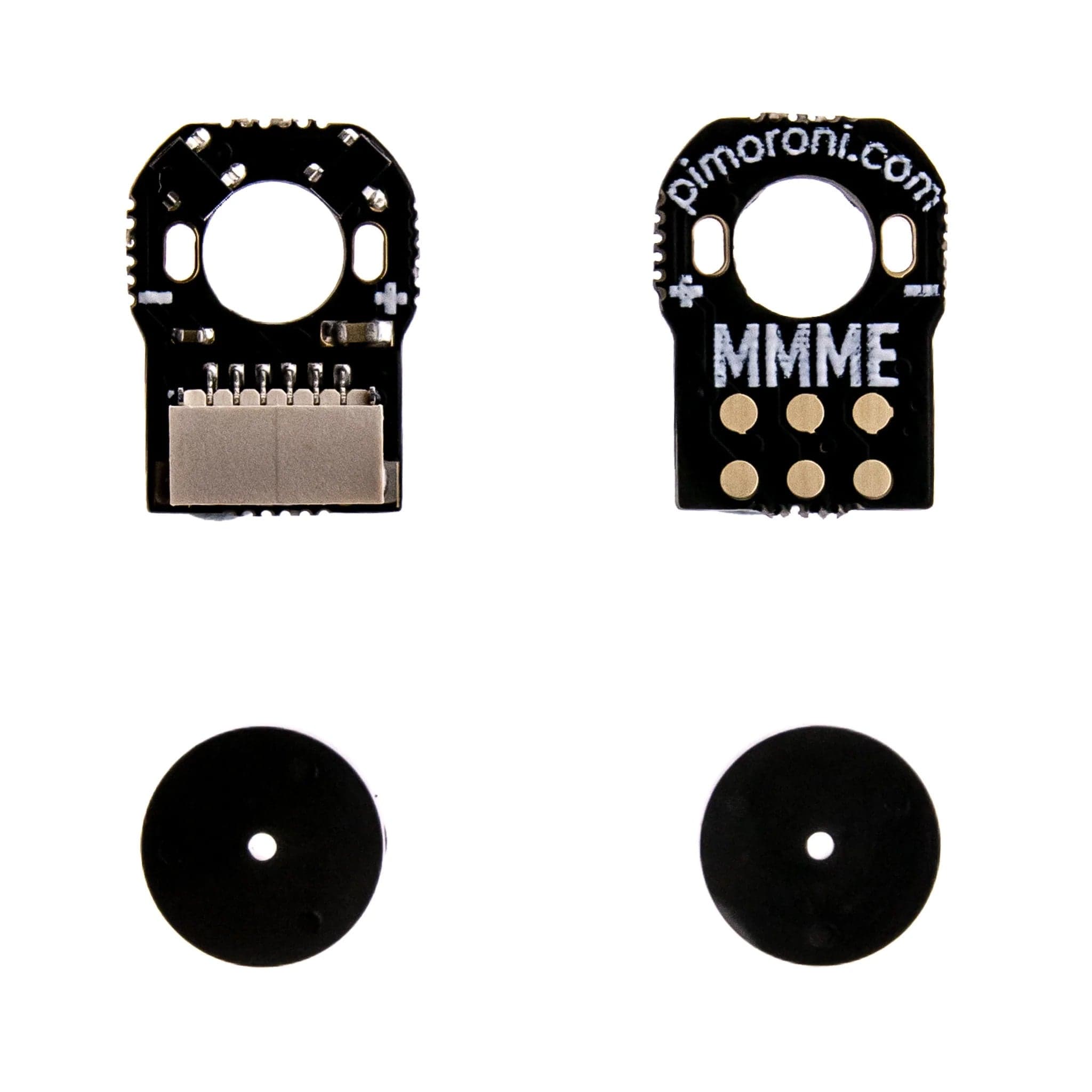
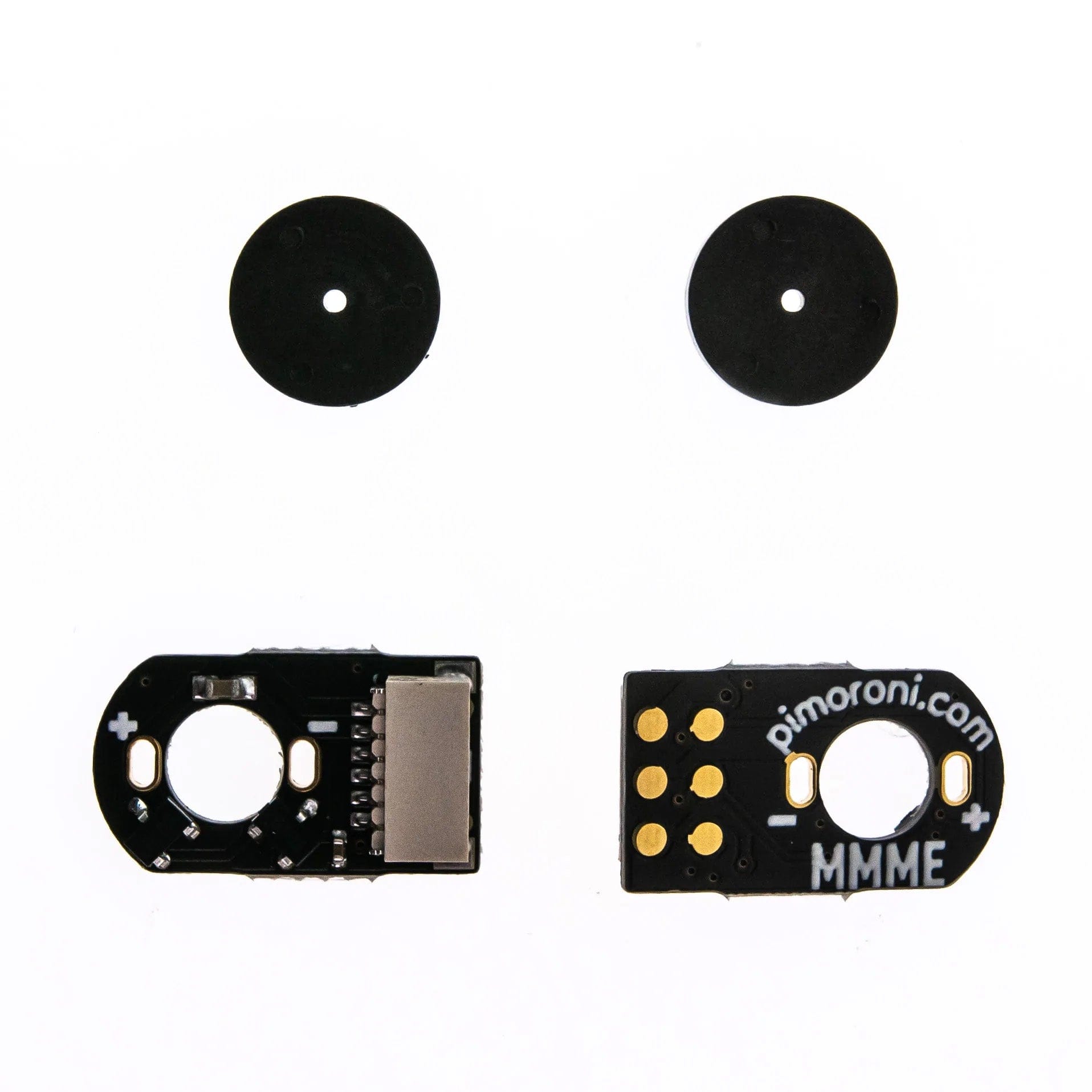
We've designed Motor 2040 to interface easily with our new MMME (Micro Metal Motor Encoder) shims which can be used to upgrade our standard Micro Metal Motors into fancy encoder motors. We also sell motors with MMMEs pre-attached, if you want to skip the soldering.
Once your motor has an MMME attached to it you can plug it into Motor 2040 with a 6-pin JST-SH cable. Convenient!
Because it's an RP2040 board, Motor 2040 is firmware agnostic! You can program it with C/C++, MicroPython or CircuitPython.
Our C++/MicroPython libraries will help you get the most out of Motor 2040, they're packed with powerful features for working with motors. You'll get best performance using C++, but if you're a beginner we'd recommend using our batteries included MicroPython build for ease of getting started.
You can also use CircuitPython on your Motor 2040, if you want access to all the nice conveniences of Adafruit's ecosystem.
If your breakout has a QW/ST connector JST-SH to JST-SH cable, or you can easily connect any of our I2C Breakout Garden breakouts with a JST-SH to JST-SH cable; coupled with a Qw/ST to Breakout Garden adaptor.
Motor 2040 can be powered either by plugging the board into a USB-C power source (like a PC or power bank) or by connecting a battery pack to the EXT PWR or VSYS connections. On an unmodified board, you should only have one power source connected at a time, to avoid back-powering your computer or battery.
If you want to have two power sources connected at the same time, Motor 2040 has two traces on its underside that you can cut to do this safely.
Below is a simplified circuit diagram showing the power wiring:

Your payment information is processed securely. We do not store credit card details nor have access to your credit card information.