Inventor HAT Mini
Price:
Sale price
£24
Stock:
Quantity:
Login / Signup
Cart
Your cart is empty



The Inventor HAT Mini helps transform a Raspberry Pi computer into a robot, prop, kinetic sculpture, creepy automaton or other exciting moving things. Want to drive a couple of fancy motors with encoders (or hook up standard motors with jumper wires)? Yep! Add up to four servos? Sure? Attach a little speaker so you can make noise? No problem!
It's expandable too, with a pass-through header for stacking with other boards and four extra ADC-capable GPIO pins - you could use these to attach analogue or digital sensors, or more buttons and LEDs. Speaking of LEDs, we've also managed to fit in 8 addressable RGB LEDs (AKA Neopixels) - that's one for each servo and GPIO/ADC channel so you can use them as indicators.
We wanted Inventor HAT Mini to be fast and easy to get started with, so we've equipped it with convenient pre-soldered pin headers, a Qwiic/ST connector for plugging in breakouts and a fully featured Python library with plenty of helpful examples. We've added an unpopulated external power input and the ability to use higher voltage motors and servos (up to 10V) for power users.
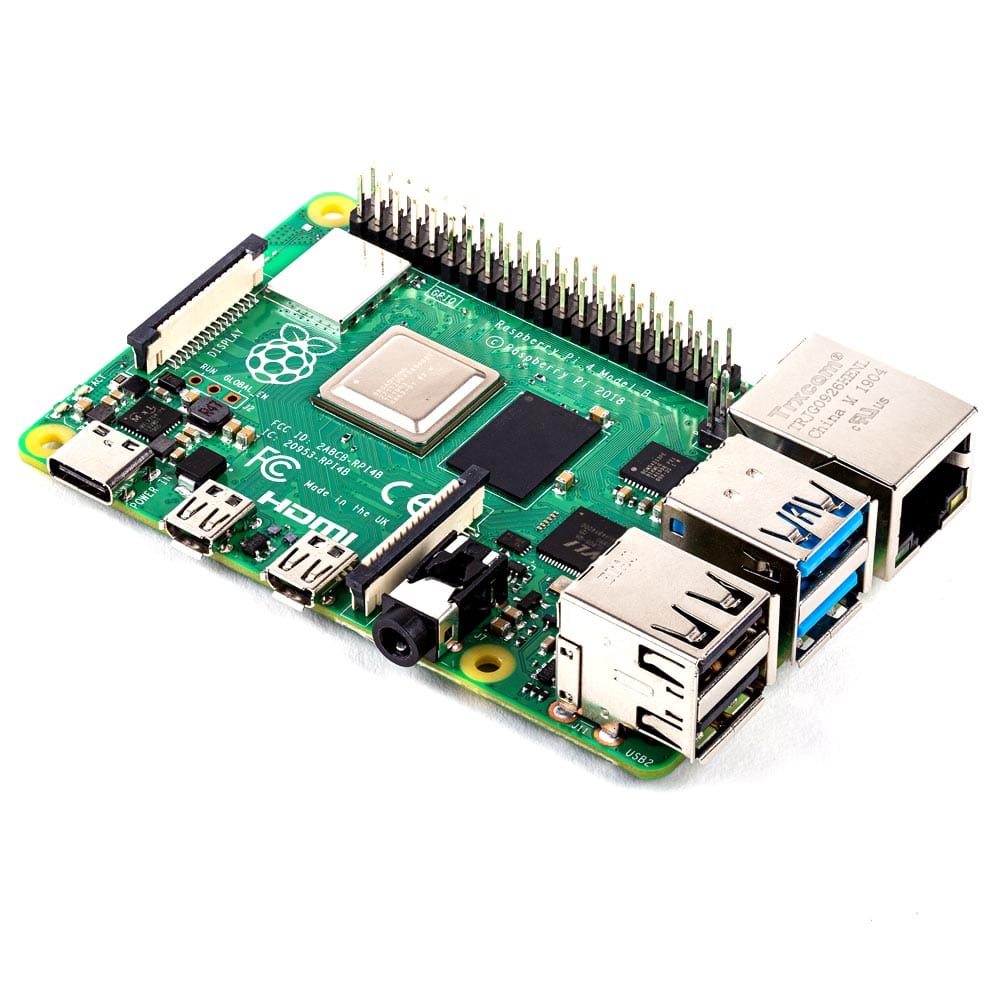
The Inventor HAT Mini is compatible with all Raspberry Pi computers with a 40-pin header attached. Mini HATs fit especially neatly on top of Raspberry Pi Zero boards, though.
Raspberry Pi, motors, servos and speakers are sold separately.
Your payment information is processed securely. We do not store credit card details nor have access to your credit card information.