Grove - Doppler Radar (BGT24LTR11) (24GHz Transceiver)
Price:
Sale price
£63.30
Stock:
Quantity:
Login / Signup
Cart
Your cart is empty
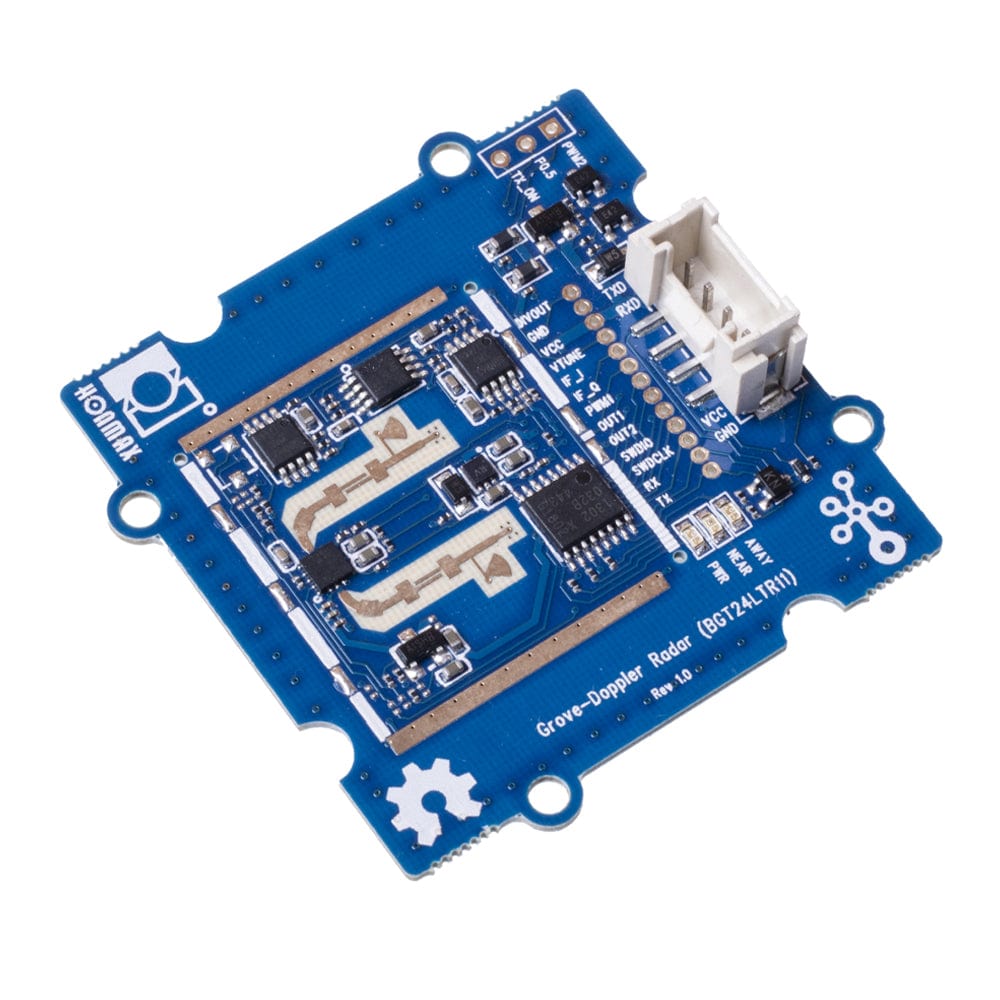
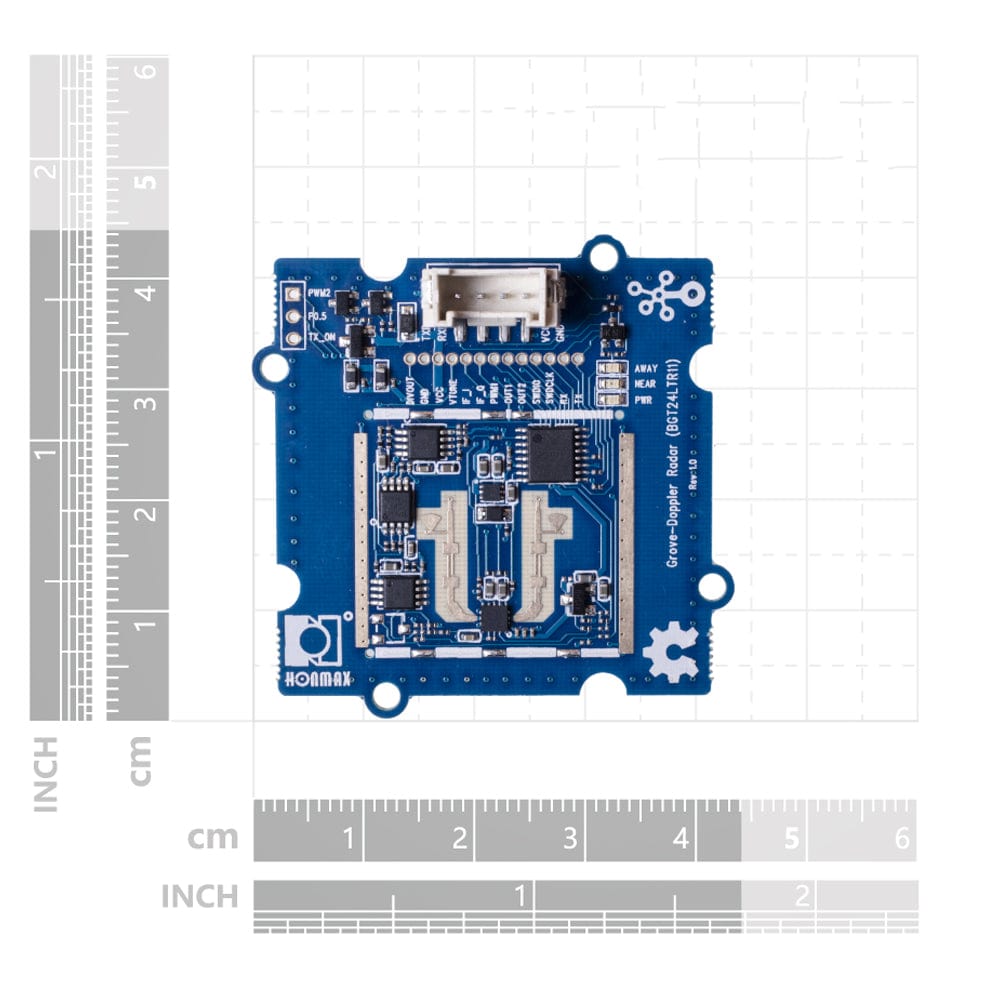
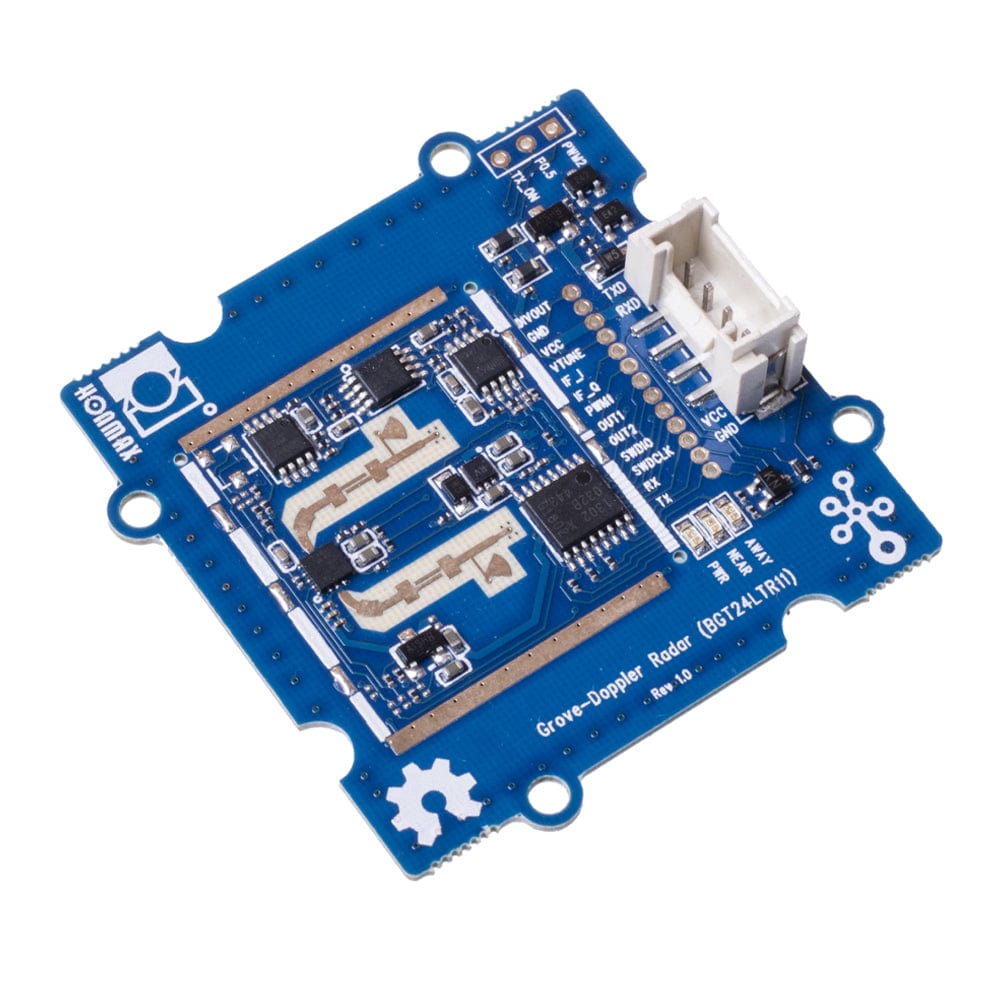
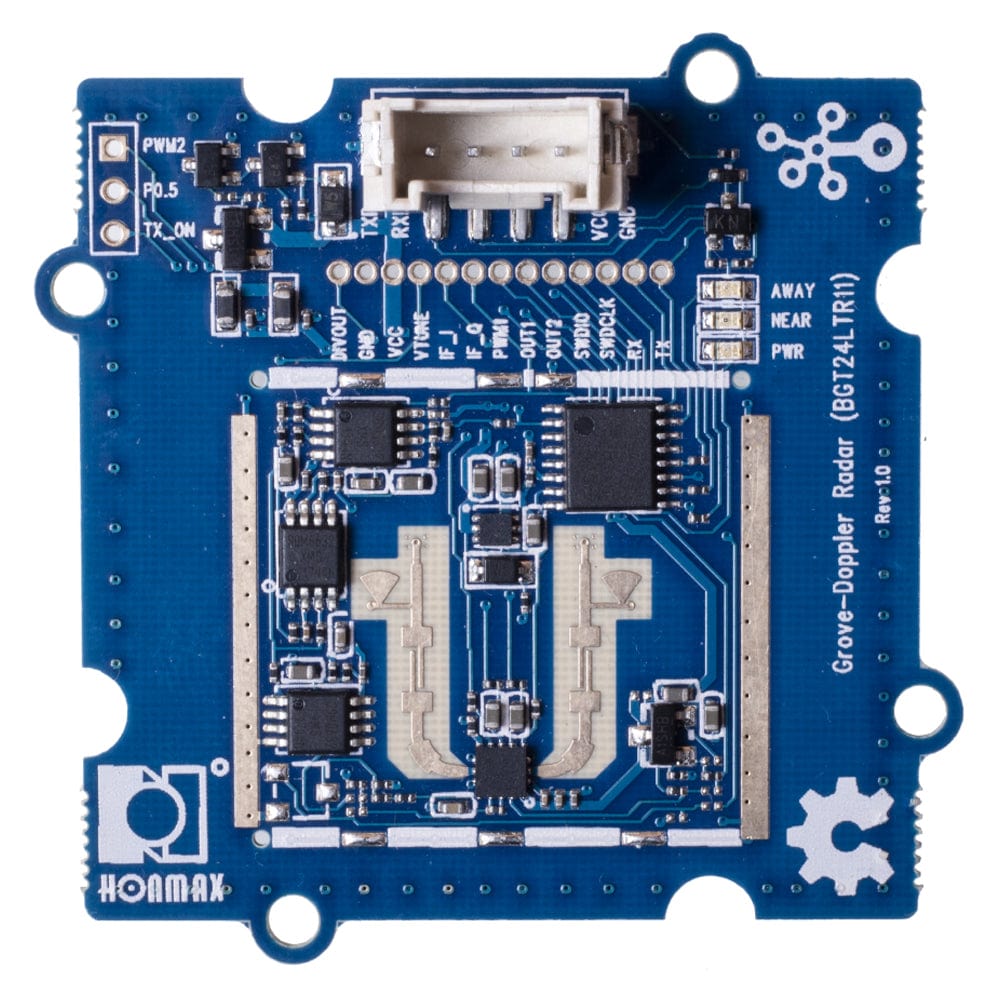
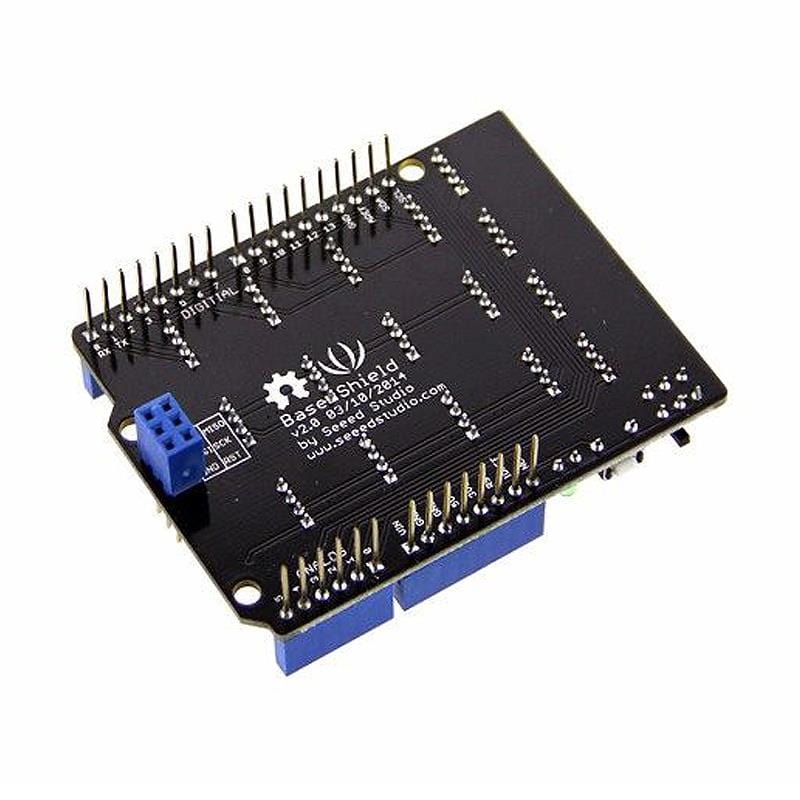
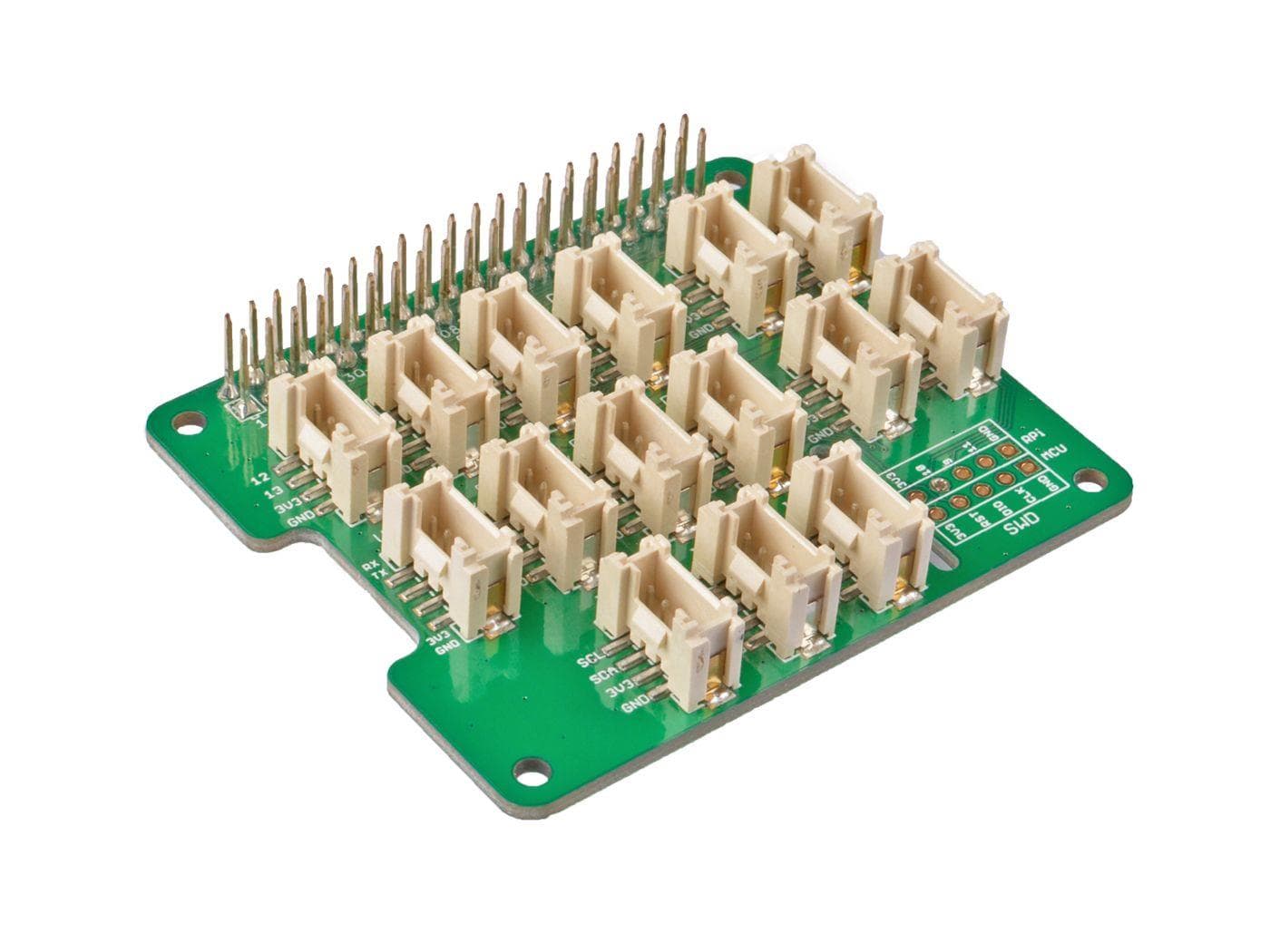
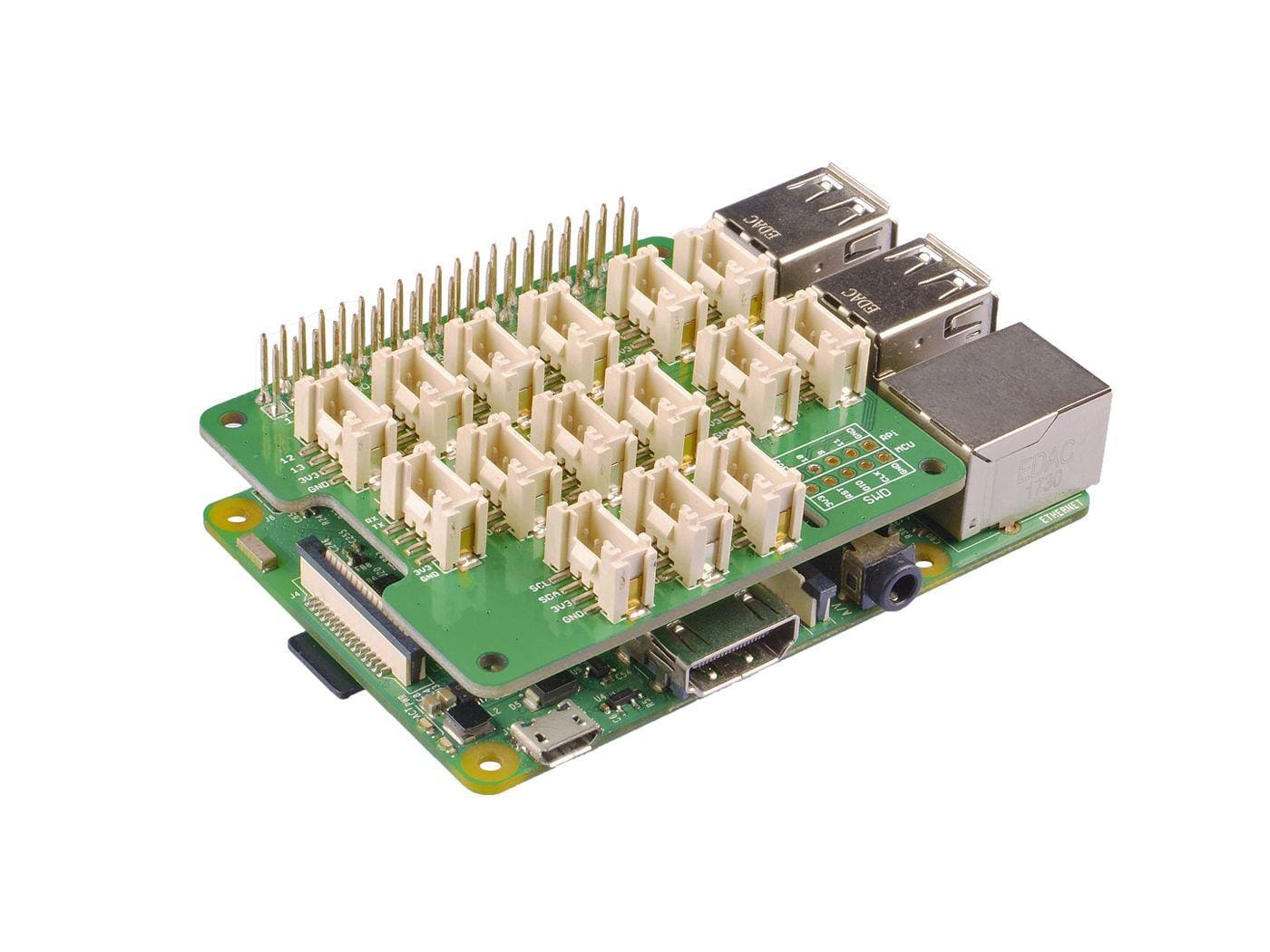
The Doppler Radar is a compact and low-power all-in-one sensor (Distance, Motion, Velocity and Angle Detection) based on the BGT24LTR11 Silicon Germanium MMIC, a 24GHz radar transceiver, and driven by the XMC1302 MCU with an Arm® Cortex®-M0 core. It is compatible with Arduino (With a Grove - Base Shield) and Raspberry Pi (Only with the Grove-Base HAT)
Its high frequency allows it to penetrate through objects, meaning it can be installed behind surfaces without needing direct exposure, making it especially useful in security systems. Additionally, it performs well in harsh weather conditions, such as high temperatures, dust, and rain, providing reliable operation in challenging environments.
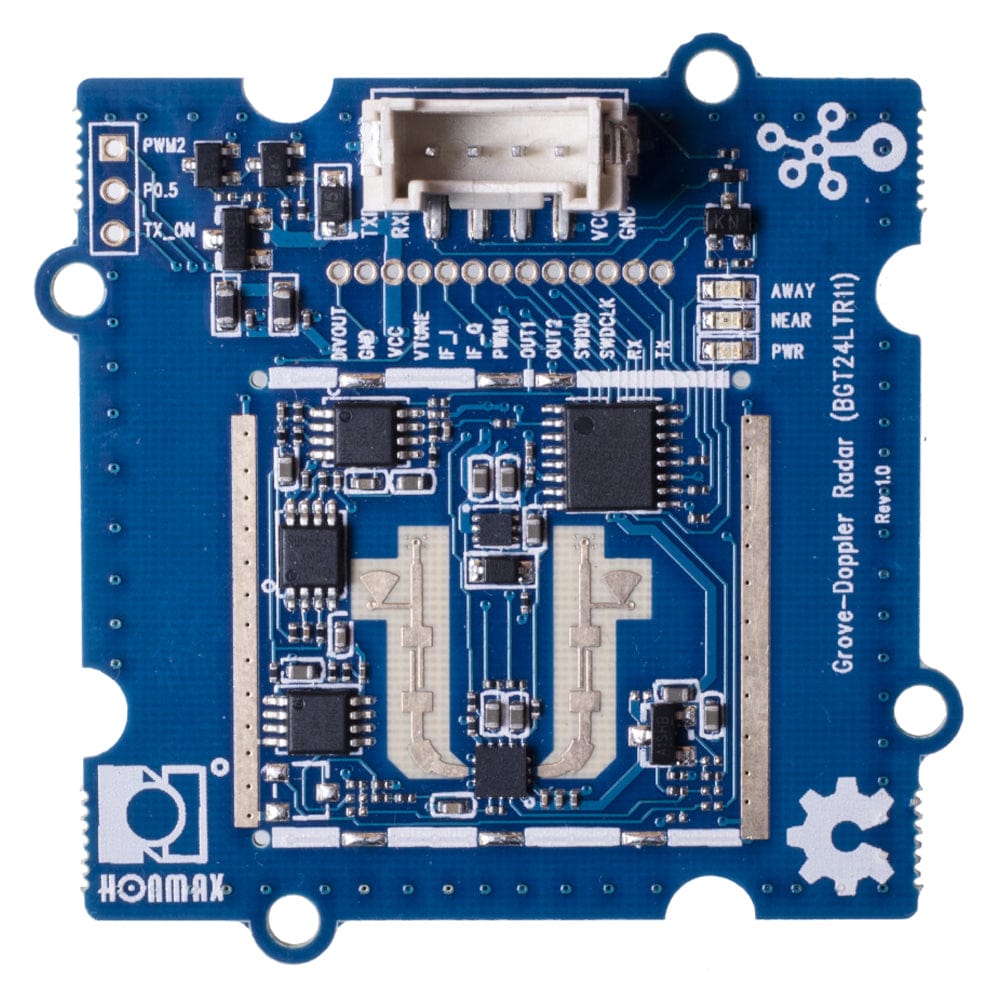
| MMIC | BGT24LTR11 |
| MCU | XMC1302 Arm® Cortex®-M0 |
| Transmission Frequency | Min: 24GHz |
| Typical | 21.125GHz |
| Max | 24.25GHz |
| Output Power (EIRP) | 7dBm @ 25°C |
| Update Time | 300ms |
| Communication Interface | UART (115200) |
| Detection Distance | 10m @ 0dBsm |
| Standard Detection Field | 65° / horizontal (-6dB); 22° / vertical (-6dB) |
| Supply Voltage | 3.3-5V |
| Weight | 5g |


Your payment information is processed securely. We do not store credit card details nor have access to your credit card information.