RoboHAT2 Robot Controller for Raspberry Pi
Price:
Sale price
£28.50
Stock:
Quantity:
Login / Signup
Cart
Your cart is empty
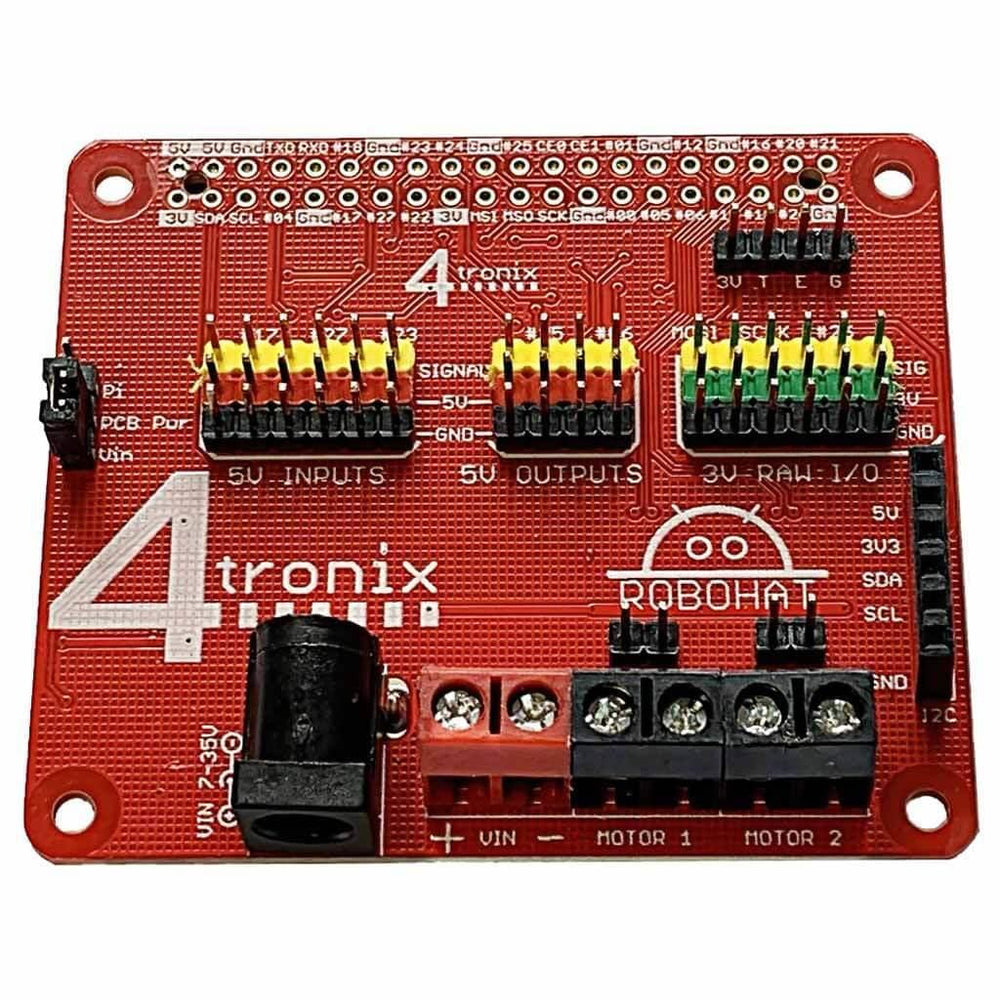
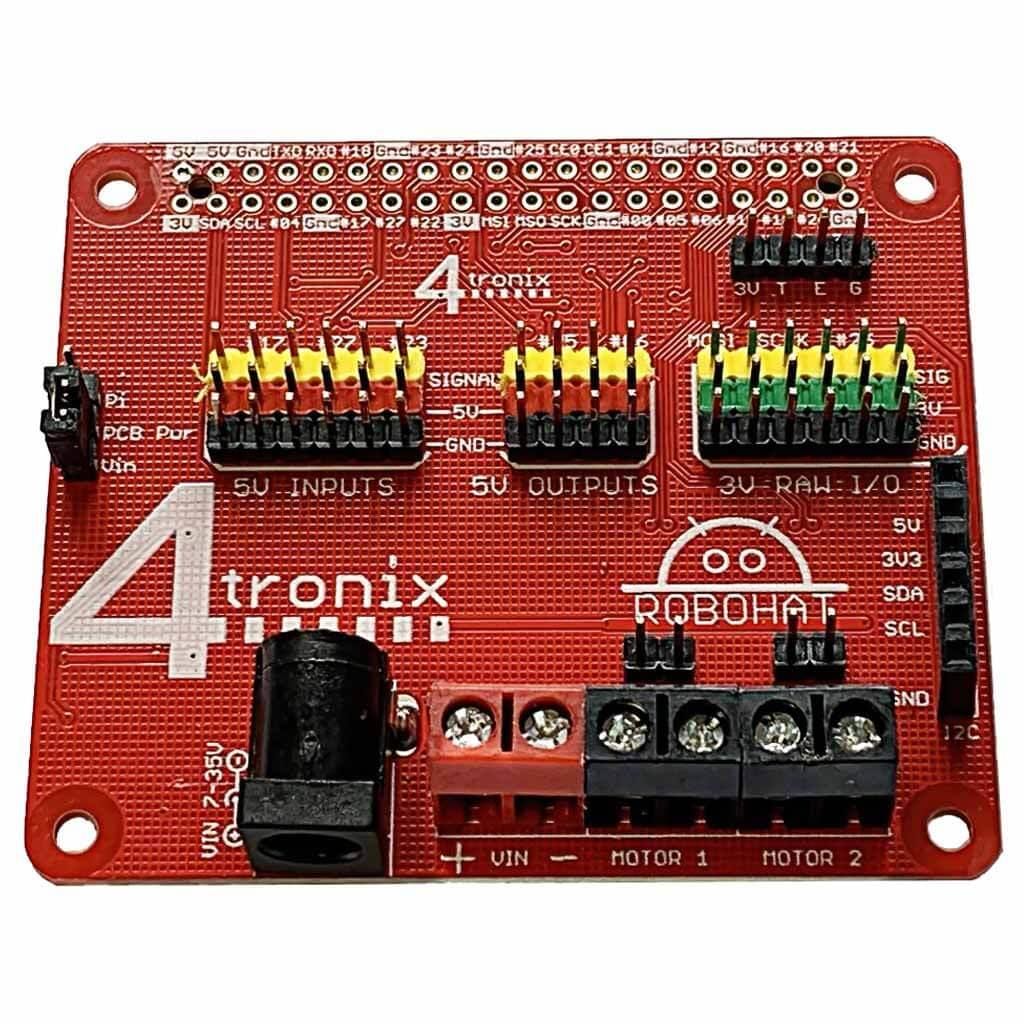
The RoboHAT2 is a complete robotics controller for the Raspberry Pi, successor to the original RoboHAT!
Ideal for making Raspberry Pi robots with handy features to expand your project, the RoboHat2 can control 2-4 motors and provides up to 3.5A per channel and can use up to 25V.
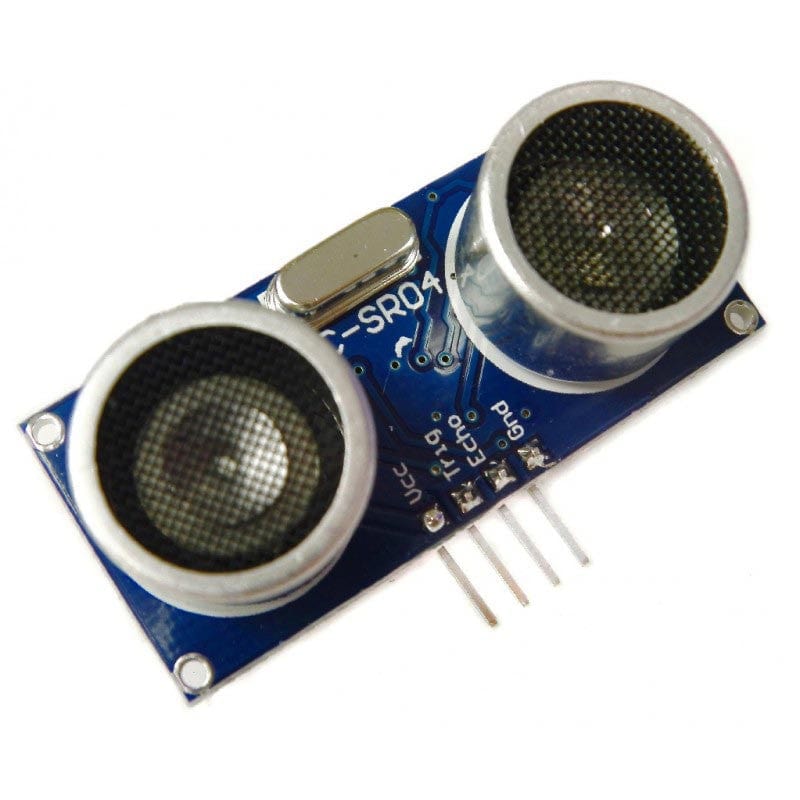
The HAT includes a switching regulator to power the Raspberry Pi via 7-10V batteries, LED indicators, 5V level-shifted GPIO inputs and outputs, a dedicated connector for a distance sensor, I2C breakouts and MORE!
Supports all models of Raspberry Pi with 40-pin Connector. Supplied fully assembled, no soldering is required.
Just look at the features provided in this small board:
To download the library and example programs, you can use the following commands from your Raspberry Pi in the home folder (open LXTerminal from desktop):
Your payment information is processed securely. We do not store credit card details nor have access to your credit card information.