LC29H(DA) GPS/RTK HAT for Raspberry Pi
Price:
Sale price
£57.60
Stock:
Login / Signup
Cart
Your cart is empty

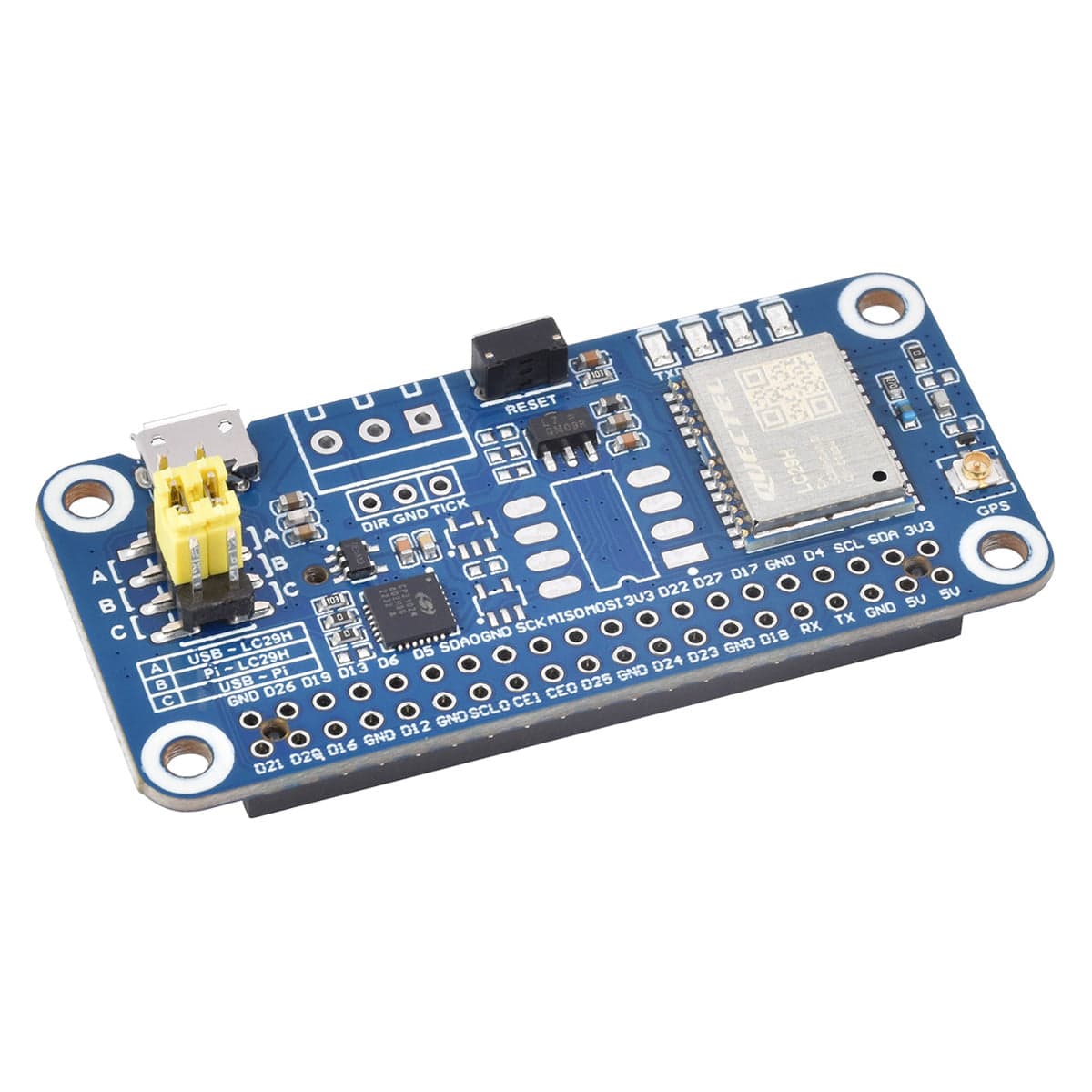
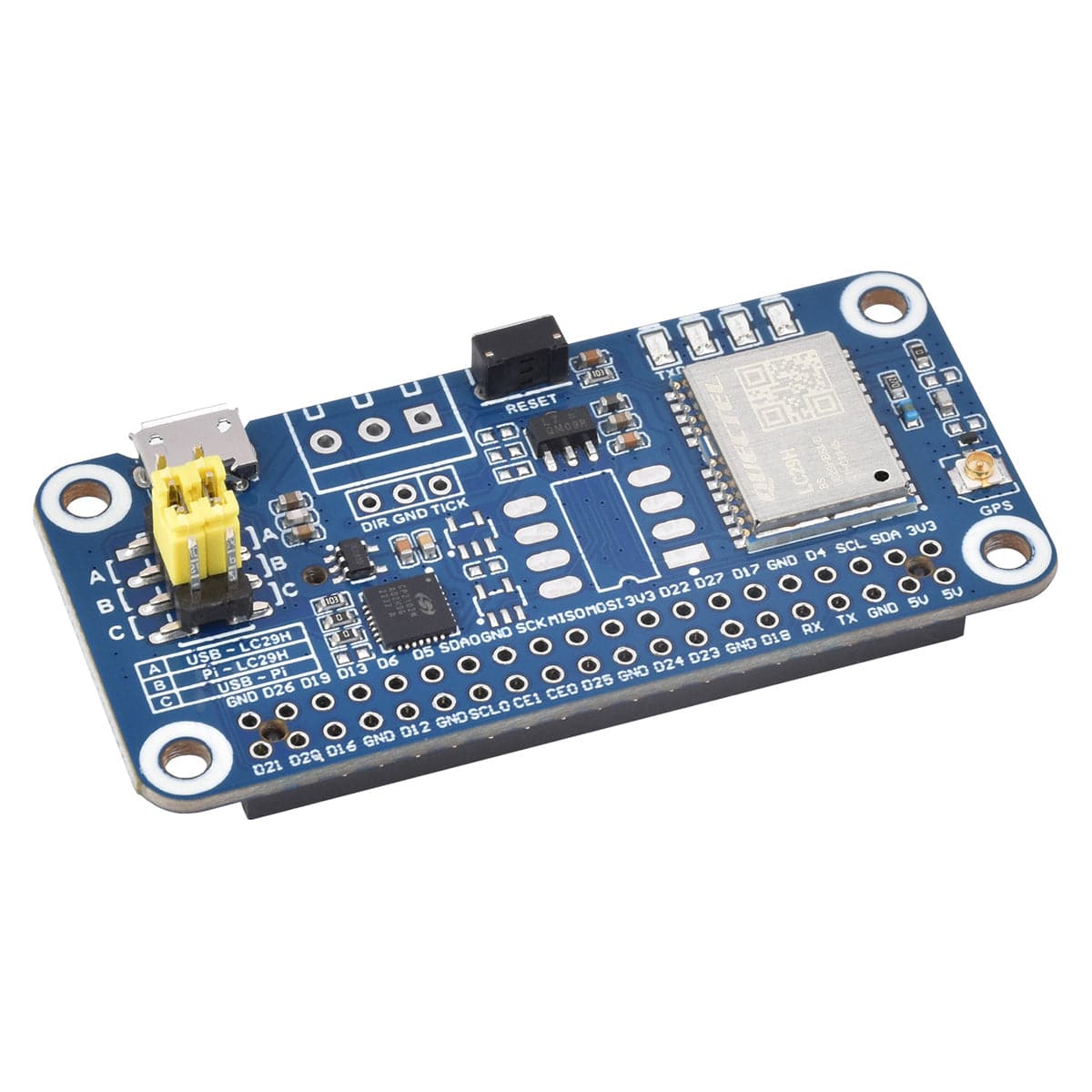
This LC29H(DA) HAT has L1+L5 dual-frequency and multi-GNSS signal tracking, significantly reducing multipath effects in urban environments and strengthening positioning accuracy with low power consumption. Equipped with a built-in LNA and SAW filter, it has high sensitivity and strong anti-interference capability. Utilising dual-band positioning and RTK technology, it provides centimetre-level high-precision positioning, making it ideal for real-time tracking systems and sharing economy applications, including drones, smart farm machinery, and shared two-wheelers. It supports fast convergence dual-band RTK centimetre-level positioning for high-precision terminal device applications.
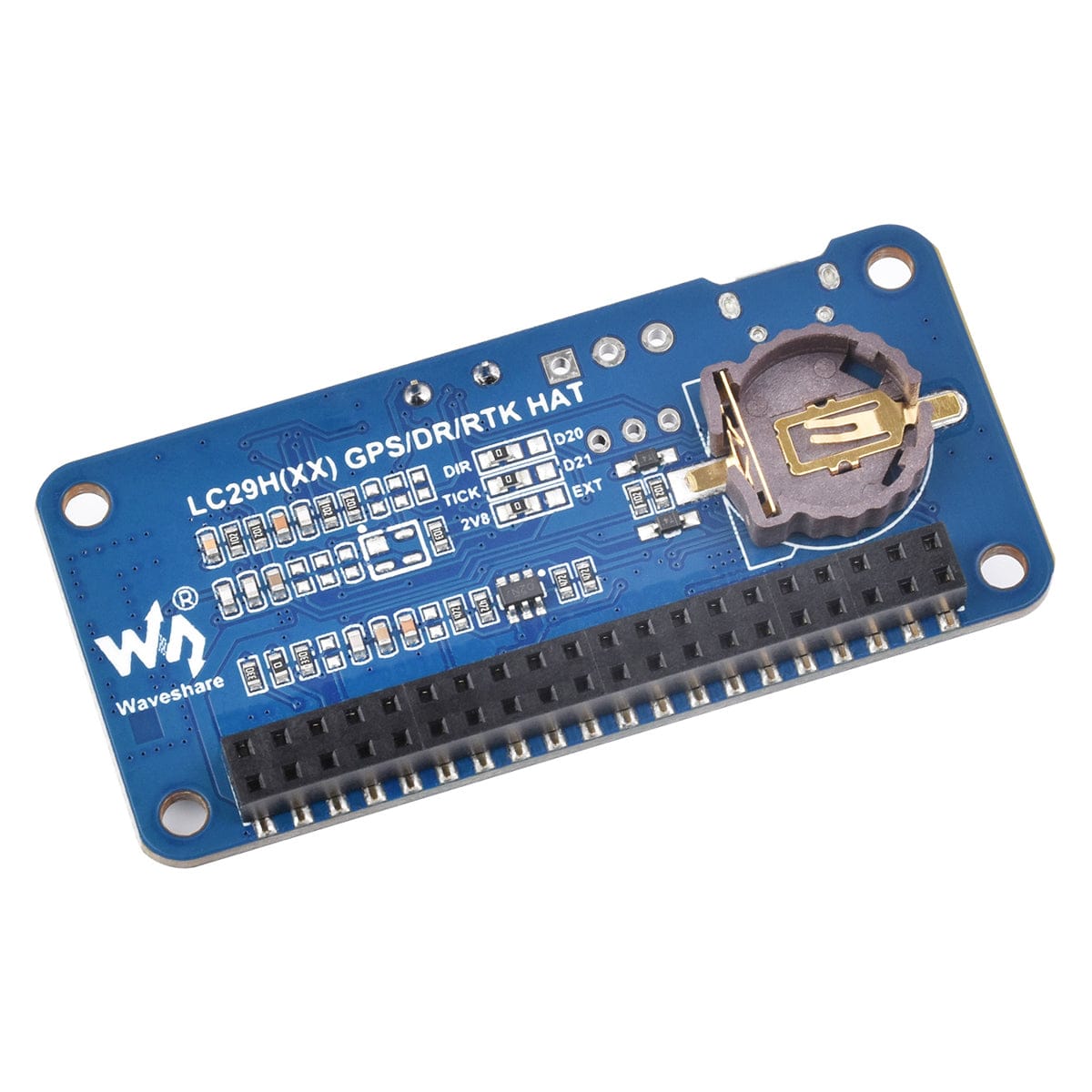
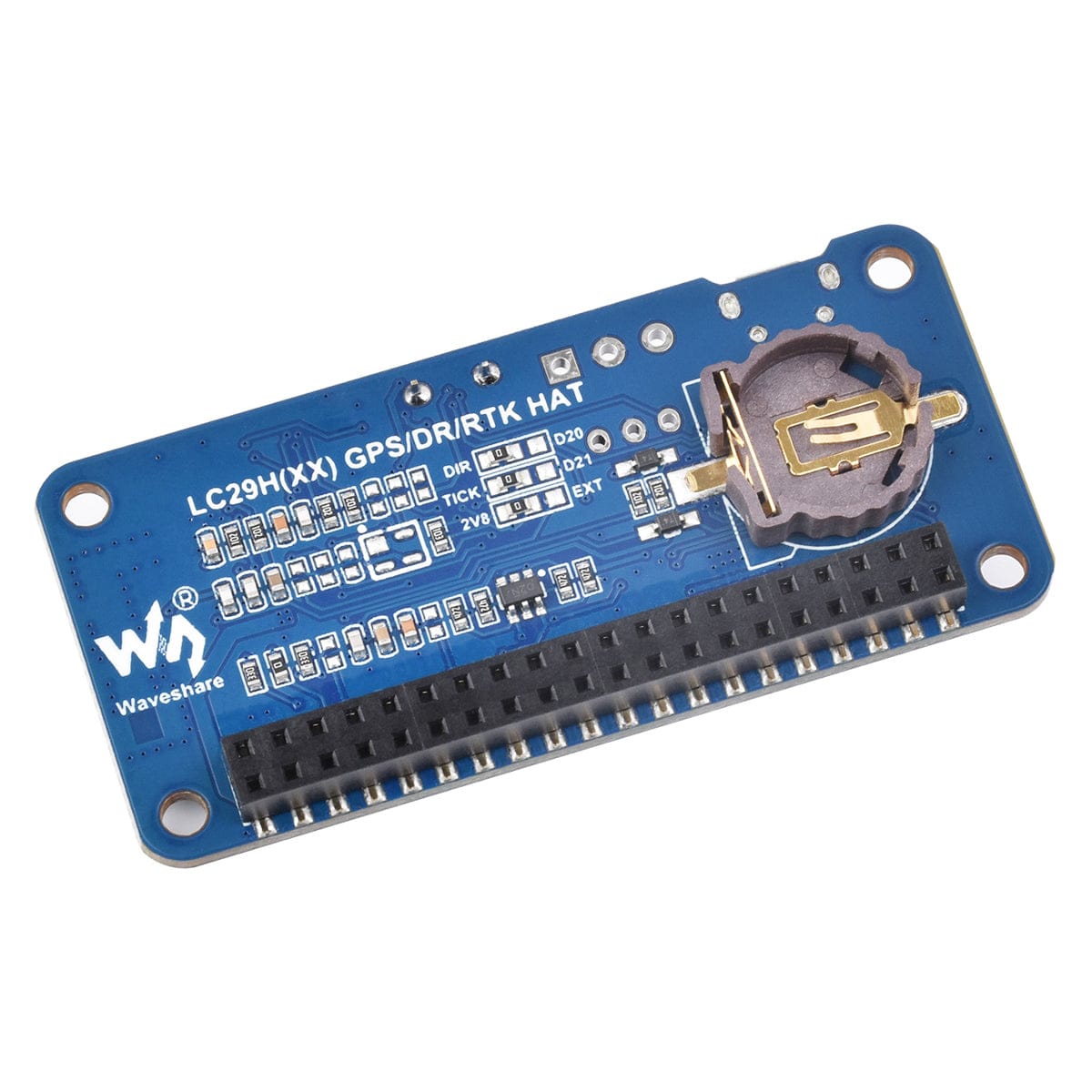
The HAT features a standard Raspberry Pi 40-pin GPIO extension header, providing compatibility with Raspberry Pi series boards and Jetson Nano. It supports simultaneous tracking of L1+L5 dual-band satellite signals, reducing multipath effects and enhancing positioning accuracy in urban canyons. It also supports concurrent reception of multi-GNSS systems (GPS, BDS, GLONASS, Galileo, and QZSS) while maintaining low power consumption. The built-in low noise amplifier and acoustic surface filter deliver -165dBm high sensitivity and improved anti-interference performance. Comprehensive online development resources and a manual with Python examples for Raspberry Pi and Jetson Nano are included to assist with development.
We also have the
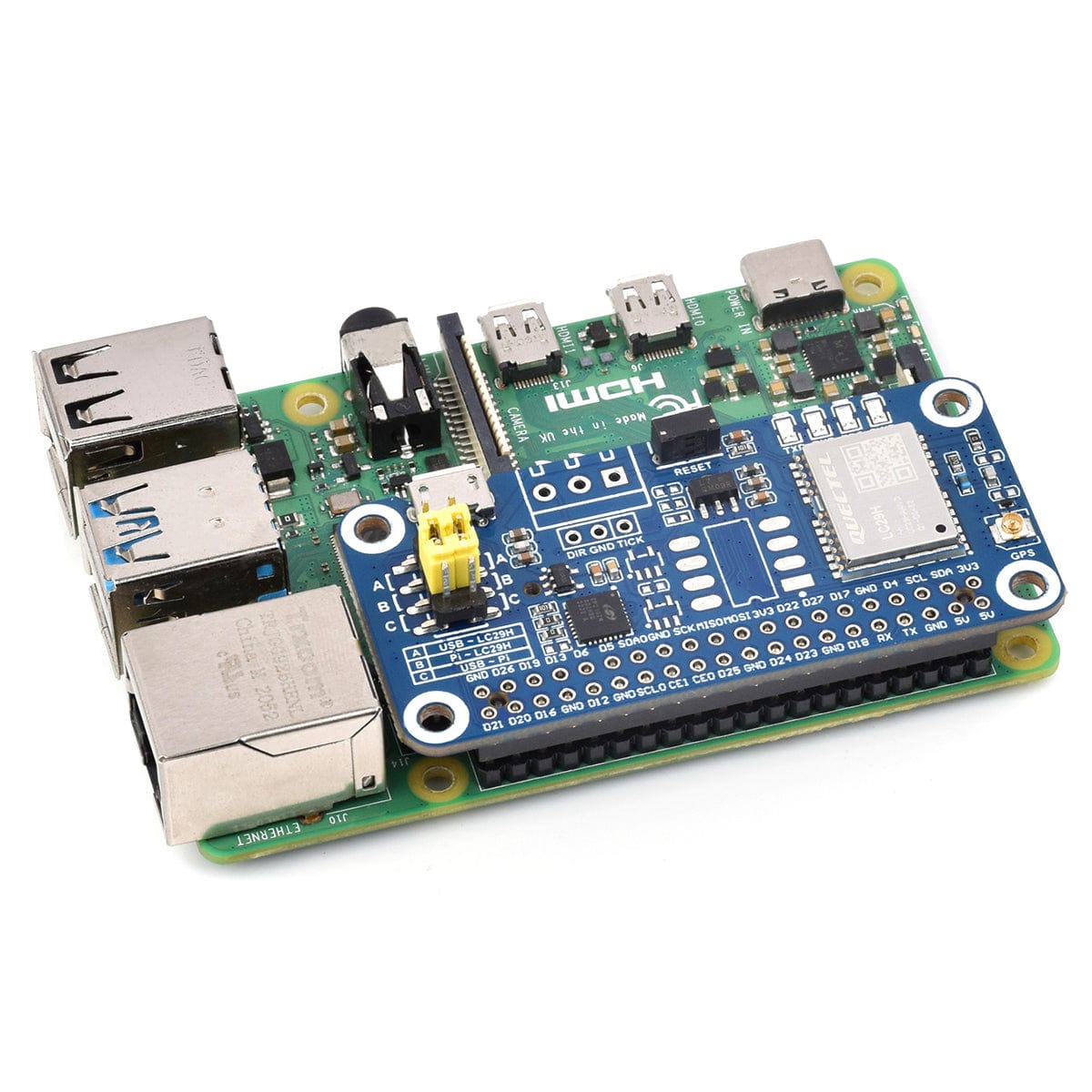
Note: The Raspberry Pi boards are NOT included

| Frequency Band | GPS/QZSS: L1C/A, L5 BDS: B1I, B2a Galileo: E1, E5a GLONASS: L1 |
|
| Number of Concurrent GNSS | GPS/QZSS+BDS+Galileo+GLONASS | |
| SBAS (WAAS, EGNOS, MSAS, GAGAN) | N/A | |
| RTK Function | RTK Rover | |
| Positioning Accuracy | PVT | 1m CEP |
| RTK | 0.01m+1ppm CEP | |
| Navigation Update Rate | PVT | 1~10Hz |
| RTK | 1Hz | |
| RAW | 1Hz | |
| RTK Convergence Time | <10s | |
| Time to First Fix (AGNSS OFF) | Cold Starts | 26s |
| Hot Starts | 1s | |
| Aided Starts | 16s | |
| Time to First Fix (EASY ON) | ||
| Time to First Fix (AGNSS ON) | Cold Starts | 5s |
| Hot Starts | 5s | |
| Aided Starts | 5s | |
| Sensitivity | Tracking and Navigating | -165dBm |
| Re-Acquisition | -157dBm | |
| Cold Starts | -145dBm | |
| Velocity Accuracy | N/A | |
| PPS Accuracy | N/A | |
| Dynamic Performance | Acceleration (Max): 4g | |
| Altitude (Max):10000m | ||
| Velocity (Max): 500m/s | ||
| Communication Interface | UART(9600~3000000bps, 115200bps by default) I2C(Max 400KHz) |
|
| Protocol | NMEA 0183 V4.10, RTCM 3.x | |
| Power Supply | 5V | |
| Overall Current | <40mA@5V (Continue mode) | |
| Operating Temperature | -40 - 85℃ | |
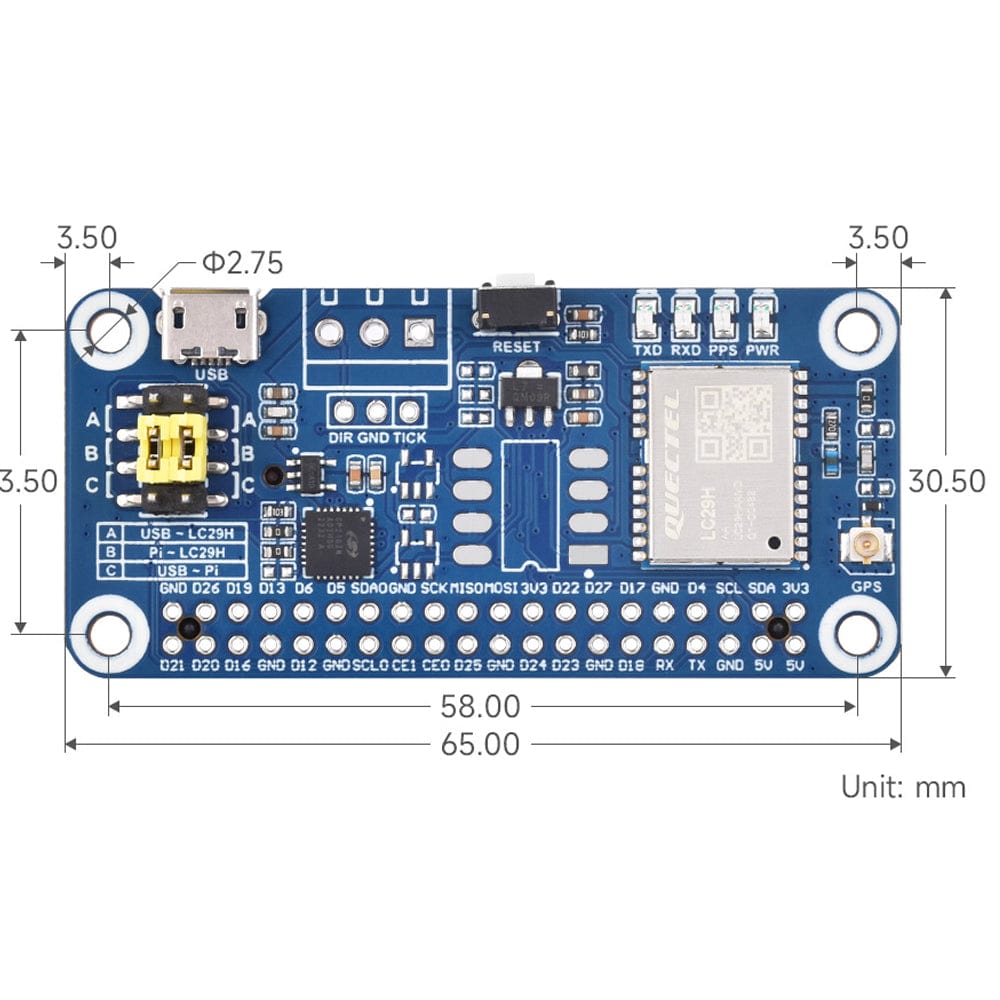
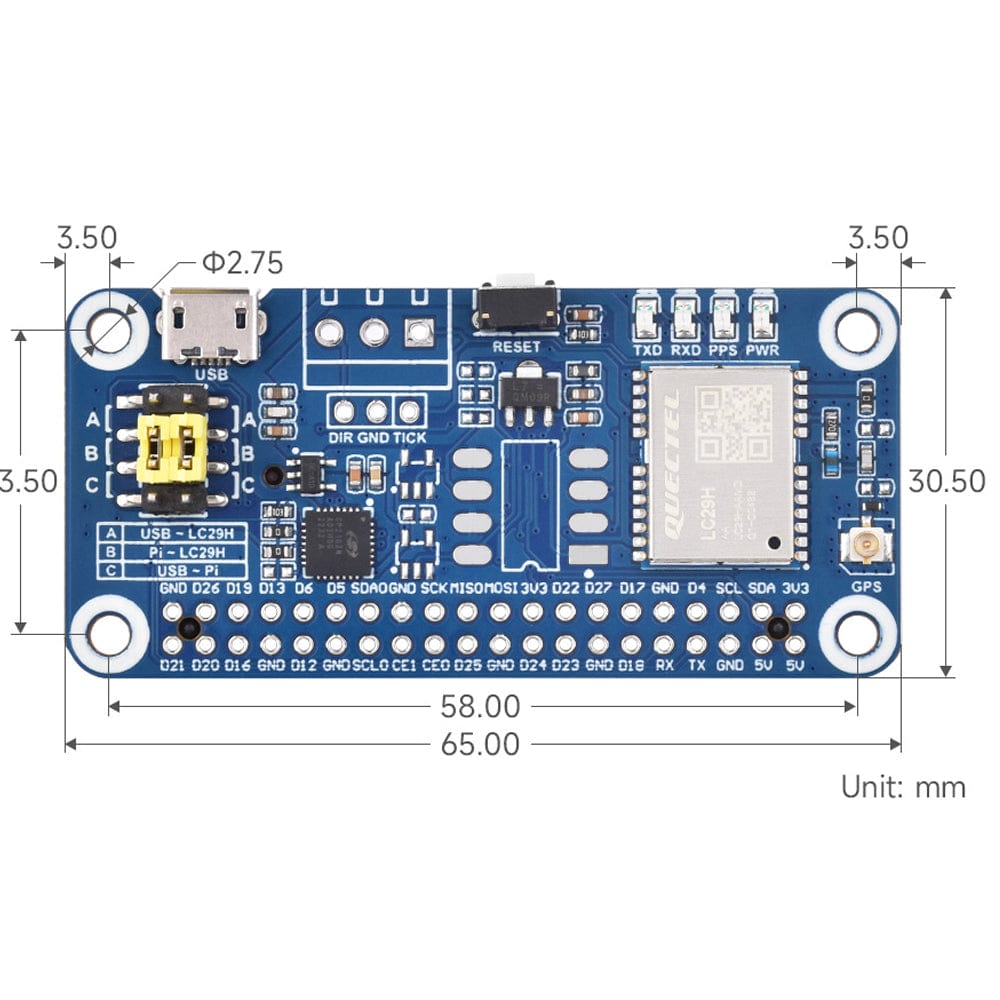
| Dimensions | 65 x 30.5mm | |



Your payment information is processed securely. We do not store credit card details nor have access to your credit card information.