Gravity: 2x 1.2A DC Motor Driver (TB6612FNG)
Price:
Sale price
£6.70
Stock:
Login / Signup
Cart
Your cart is empty
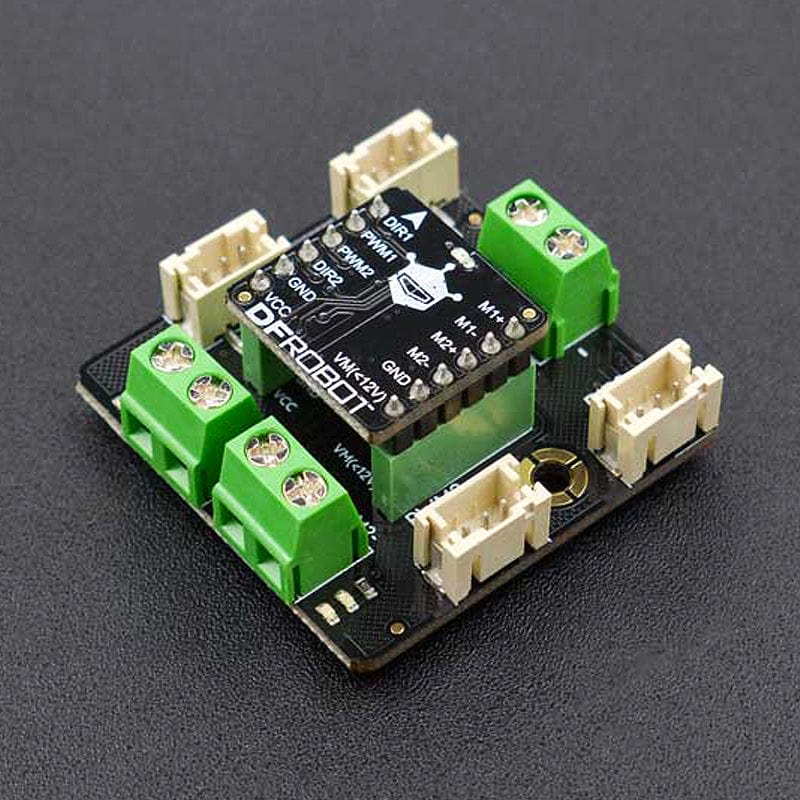

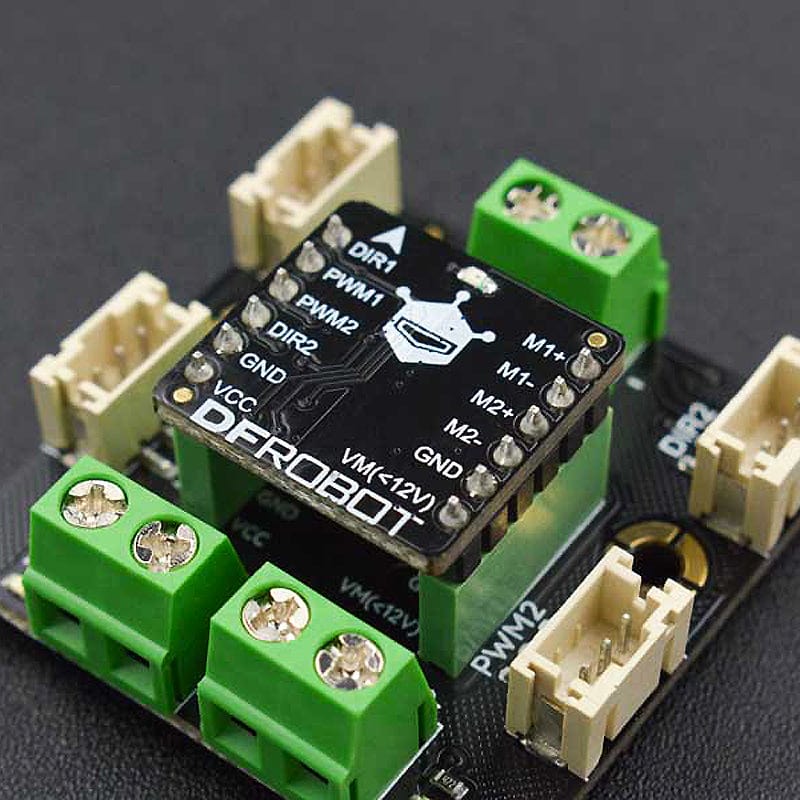
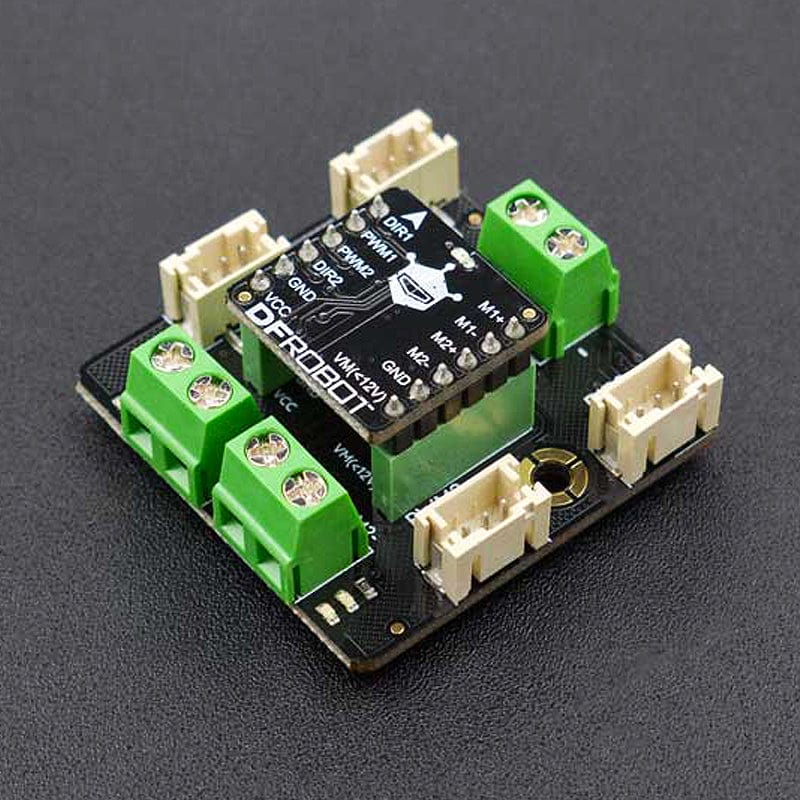
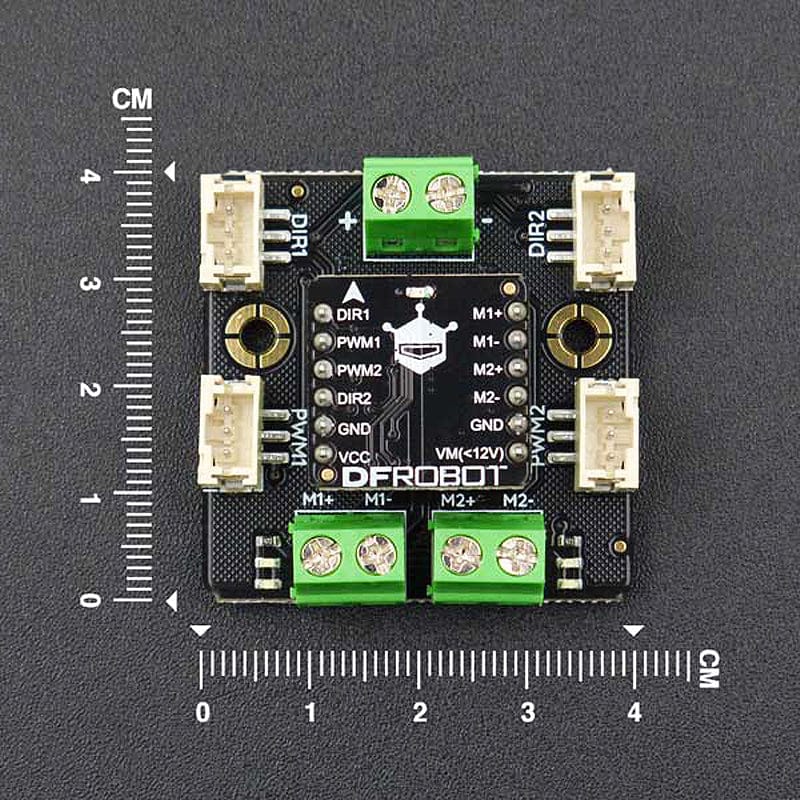
This is a DFRobot micro dual-way DC motor driver with a Gravity connector, based on the TB6612FNG motor driver chip. It inherits DFRobot L298N motor control logic, which only needs four pins to drive 2 motors.
This Gravity connector version expands four GPIO with the standard Gravity connector system, allowing you to easily wire this to a Gravity shield such as the IO Expansion Shield for Arduino Uno. No tools, no terminal blocks, no soldering - four Gravity cables are included in this set as well!
The TB6612FNG is a dual-channel full-bridge motor driver chip. The maximum continuous drive current of a single channel can reach 1.2A, peak value 2A/3.2A (continuous pulse/single pulse), which can drive a range of small DC motors. The control logic is similar to the popular L298N, including the code used with the DFRobot L298N motor driver.
The TB6612FNG driver board's pin headers can be inserted directly into a breadboard, so if you decide to keep your project compact, you can also use the TB6612FNG module separately.

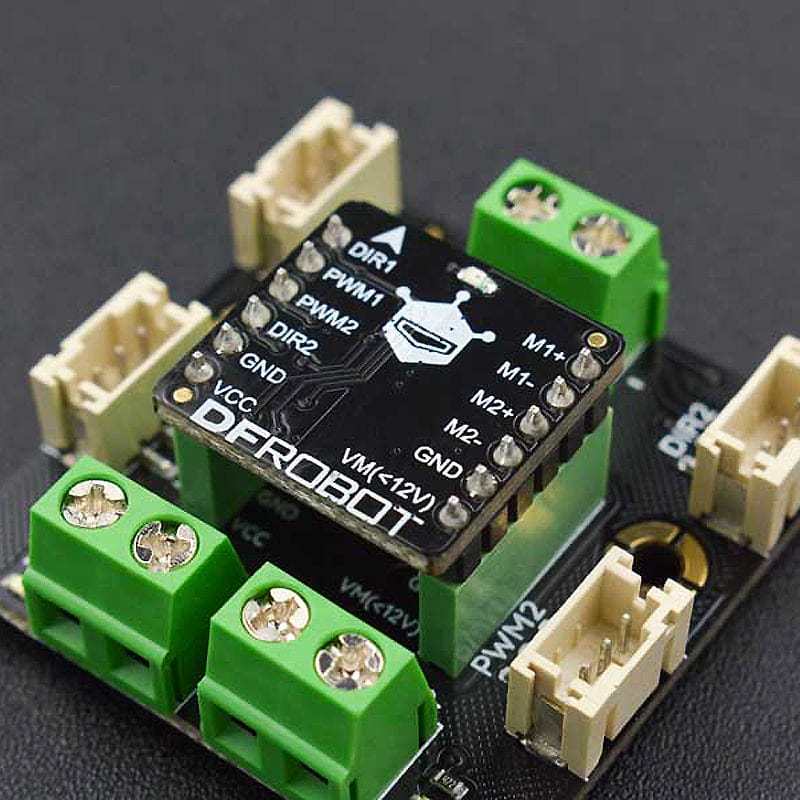
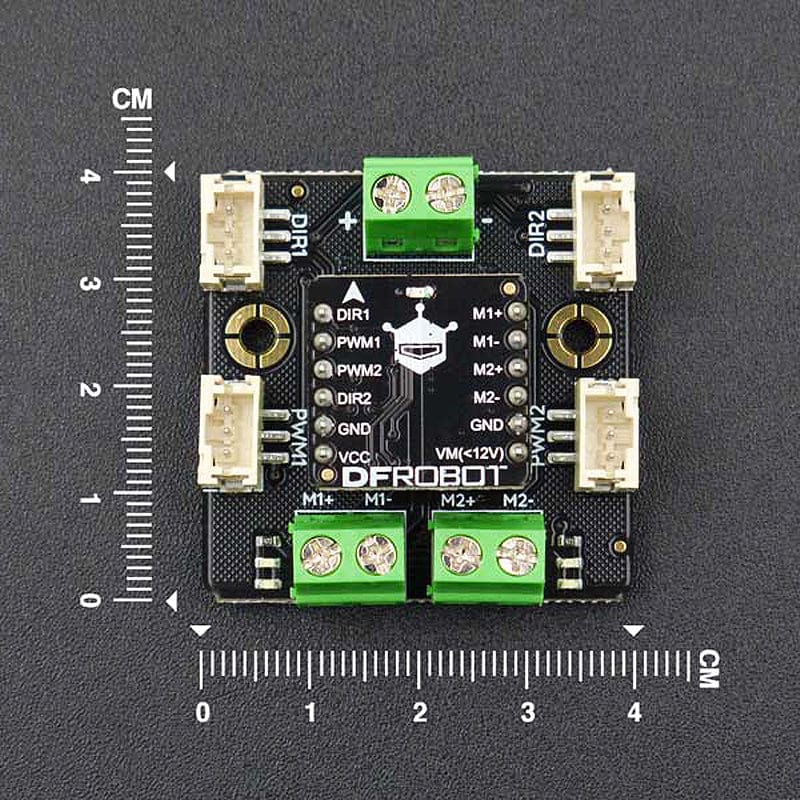
| Label | Number | Description |
| 1 | DIR1 | M1 Direction Control |
| 2 | PWM1 | M1 Speed control(PWM) |
| 3 | PWM2 | M2 Speed control(PWM) |
| 4 | DIR2 | M2 Direction Control |
| 5 | GND | Negative power supply |
| 6 | VCC | Power 3.3V-5V or IO port output high |
| 7 | M1 | A Output 1 |
| 8 | M1- | A Output 2 |
| 9 | M2 | B Output 1 |
| 10 | M2- | B Output 2 |
| 11 | VM- | Negative power supply |
| 12 | VM | Motor drive power 3.3V-12V |
Your payment information is processed securely. We do not store credit card details nor have access to your credit card information.