360° Omni-directional Triangulation Lidar D200 Developer Kit [Discontinued]
Price:
Sale price
£52.80
Login / Signup
Cart
Your cart is empty





A Lidar (Light Detection and Ranging) is a method for determining ranges by targeting an object or a surface with a laser and measuring the time for the reflected light to return to the receiver.
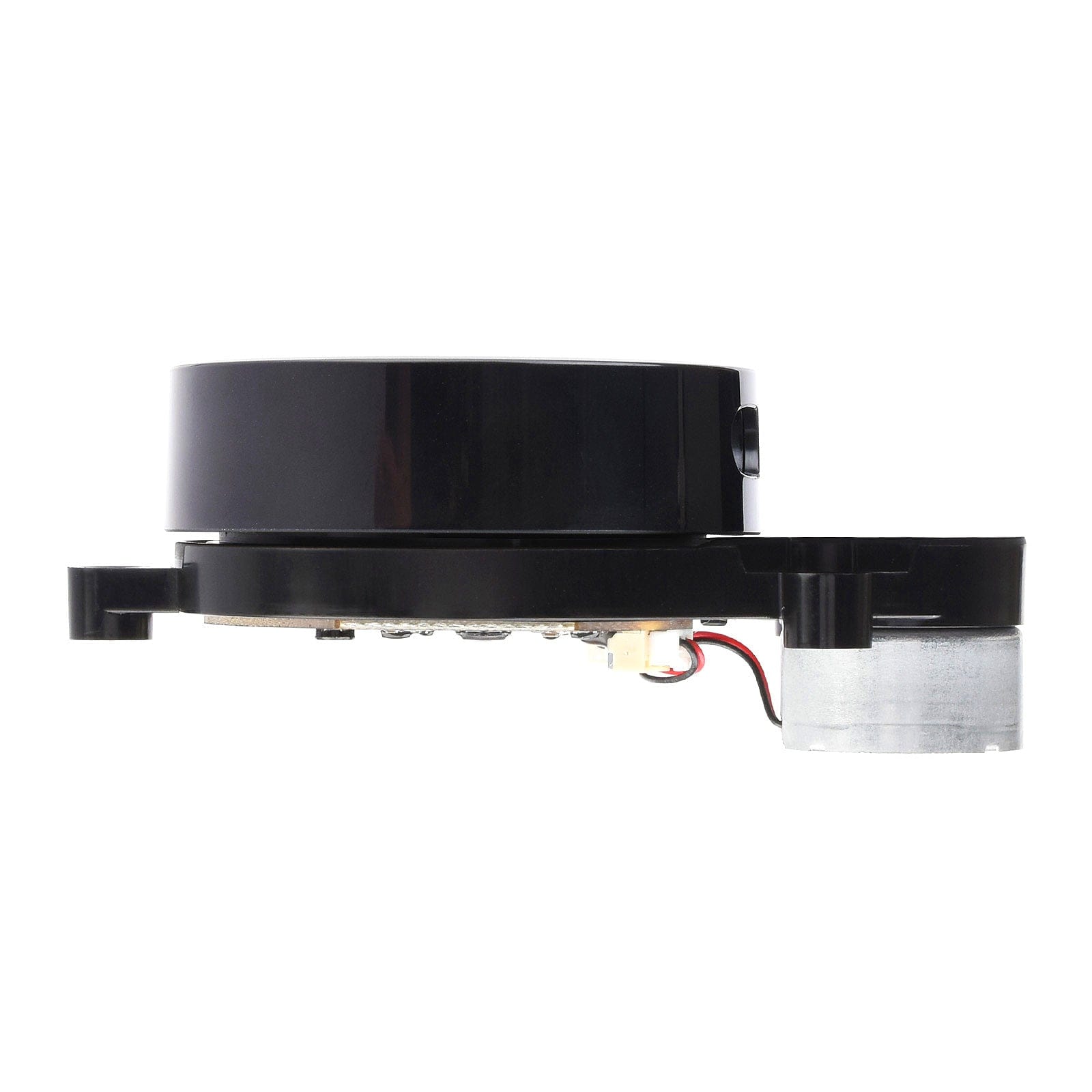
This particular Lidar rotates clockwise in the ranging core to provide a 360° omnidirectional laser scanning of the surrounding environment, thus obtaining the information of the plane point cloud of the space where it is located. The LD14 distance measurement core uses triangulation technology, which can carry out distance measurements of 23000 times per second. LD14 emits an infrared laser from a fixed angle during each range, and the laser is reflected in the receiving unit after encountering the target object.
The LD14P can sense environmental information at a longer range (8m radius), which ensures the robot’s ability to cruise and build maps in a larger area and obtain more environmental profile information.
With its start/stop control, glass wall detection to reduce collisions, strong ambient light resistance, and thin and light structure design for easier installation. This lidar kit is full of fantastic and useful features and can be used with so many different projects!
| Ranging Range | 0.1 ~ 8.0m |
| Scanning Frequency | 6Hz by default, 2 ~ 8 Hz externally controllable |
| Scanning Angle | 360° |
| Ranging Frequency | 4000 Hz |
| Ambient Light Resistance | 80000Lux (tested under sunlight condition) |
| Wavelength | 775 ~ 800nm (Typ 793) |
| Communication Interface | UART @ 230400 |
| Power Supply | DC 5V±10% |
| Power Consumption | ≤ 1.5 W |
| Operating Current | ≤ 300 mA |
| Weight | 101 g |
| Operating Temperature | -10°C ~ 50°C |
| Lifetime | 2200 hours |
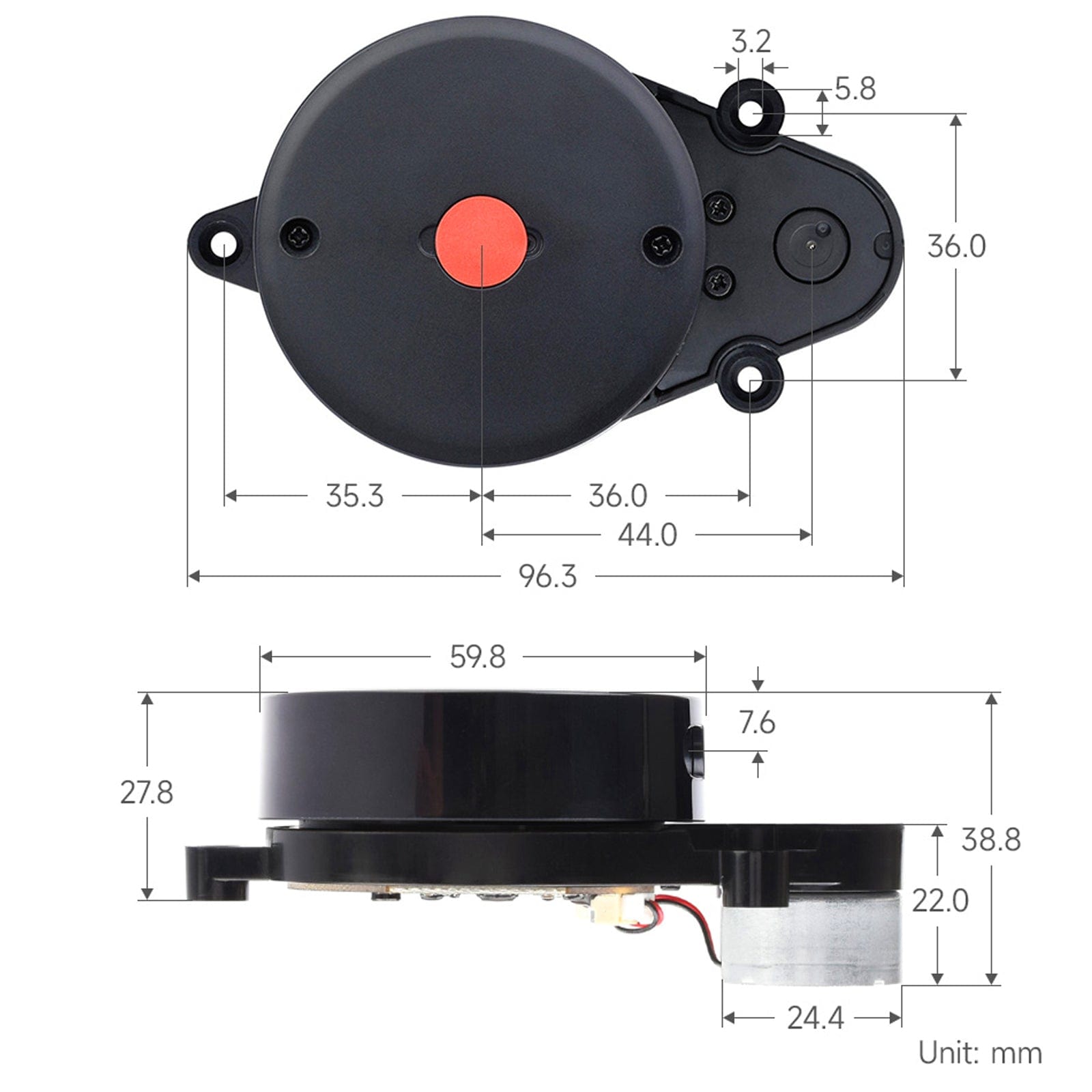
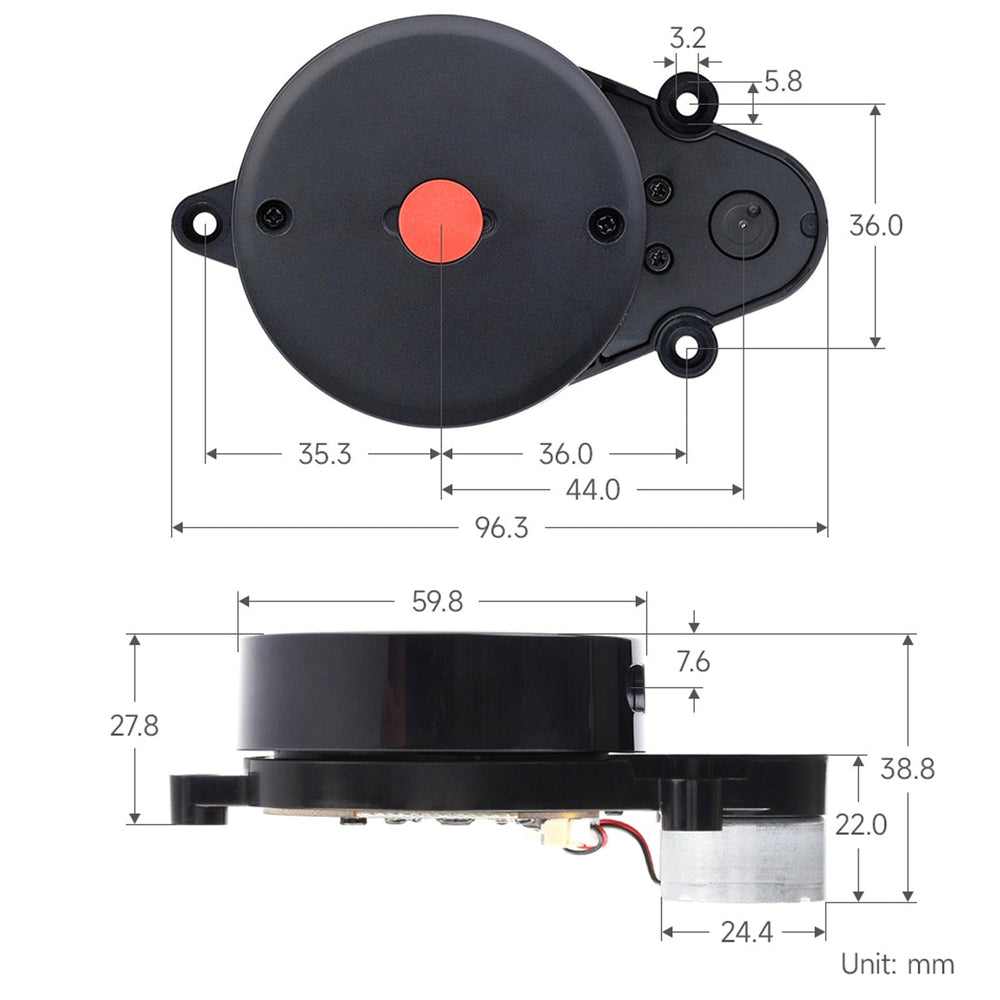
| Dimensions (L × W × H) | 96.3 × 59.8 × 38.80mm |

| No. | Function | Type | Description | Min | Typical | Max |
| 1 | PWR/RX | Input | External speed control/Radar data input | 3V | 3.3V | 3.6V |
| 2 | GND | Power supply | Negative pole of power supply | - | 0 | - |
| 3 | TX | Output | Radar data output | 3V | 3.3V | 3.6V |
| 4 | VCC | Power | Positive pole of power supply | 4.5V | 5V | 5.5V |

Your payment information is processed securely. We do not store credit card details nor have access to your credit card information.