Ryanteck RTk.GPIO - Installation Guide
In progress of being written. Previously we had a page for Linux, Mac and Windows however as a majority of the guide is the same except for the OS specific guides in part 1 we've merged them into one to prevent updating one and missing others.
This guide has 3 main parts, The first is installing python, pip and any drivers if your OS requires them. The second goes over installing the library, The third goes over testing the board.
Installing Python & Drivers
Windows
These instructions should cover Windows 7, 8 & 10 and have been tested on 7 & 10. The screenshots below are on Windows 10.
Begin by downloading python from https://www.python.org/downloads/ and download python. We are using Python 3.6.0 but we recommend you download the latest version of Python 3.X if there is a newer one available.
Wait for it to download and then click on the installer / run.
You should have a screen similar to the following:
Check the box which says "Add Python 3.X to Path" with X being the version number and click Install Now.
A popup box will appear asking if you want to allow the app to make changes. Click on yes to install.
Python will then install, after setup is finished you may close the installer.
Next plug the RTk.GPIO into your computer. Windows will detect and should install the drivers automatically for you. On Windows 10 you should see some screens in the following order.
After the driver has installed the screen should disappear. You're now ready for the next step.
Mac OSX
These instructions have been tested on El Capitan however should work on the new Mac OS Sierra.
Mac OS doesn't include the required driver like most Linux distributions do and doesn't have a central driver system like Windows so a driver has to be installed to communicate with the UART chipset on the RTk.GPIO.
The manufacturer of the chipset provides one however reports are that it causes issues on the latest version of OSX (Sierra). A user on github as modified it to fix the issue over at https://github.com/adrianmihalko/ch340g-ch34g-ch34x-mac-os-x-driver however we cannot guarantee these drivers in anyway and are contacting the manufacturer to see if we can get new drivers.
Linux
All of the listed systems have been tested in a virtual machine with the OS installed to a virtual HDD. Pixel was instead tested running from the Live DVD instead of being installed on a HDD.
Ubuntu / Mint / Debian / Pixel
Begin by opening a terminal up. On Pixel and Mint I clicked the terminal icon (Screen with >_ in it or just a screen). On ubuntu click the start icon and search terminal or press Ctrl+Alt+t
To begin we'll add our user to the dialout group. This allows us to access the serial ports without having to use sudo on our python programs.
Type in the following command. Please note that it is case sensitive.
sudo usermod -a -G dialout $USER
We found that the following command will install the requirements for all of the distributions. If already installed the system will ignore or upgrade the packages that are.
sudo apt install python3-pip python3-setuptools python3-wheel
Tested on Ubuntu 16.04, Mint & Pixel on the 29th of December 2016. These instructions should work on other Debian Based distributions and Debian itself.
Fedora / CentOS / Redhat
Begin by opening a terminal up. On Fedora I went to activities and searched terminal.
To begin we'll add our user to the dialout group. This allows us to access the serial ports without having to use sudo on our python programs.
Type in the following command. Please note that it is case sensitive.
sudo usermod -a -G dialout $USER
We found Python 3 and Pip for Python 3 were already installed on our install of Fedora. If not run.
sudo yum install python3-pip
These instructions have been tested on Fedora 25 on the 29th of December 2016 and should work on CentOS and Redhat.
OpenSUSE
Begin by opening a terminal up. I did this by typing terminal into the search and on the KDE install clicking Konsole.
To begin we'll add our user to the dialout group. This allows us to access the serial ports without having to use sudo on our python programs.
Type in the following command. Please note that it is case sensitive.
sudo usermod -a -G dialout $USER
On our test install of OpenSUSE with default options and the KDE desktop Python & Pip were already installed, if it's not on your system when you go to execute the installation of the library install it with the following command and try installing the library again.
sudo zypper install python3-pip
Tested on OpenSUSE on the 29th of December 2016.
Reboot
To make sure all are in sync and to the same point of progress we recommend you to reboot. While the board may work fine you may experience some issues until you reboot.
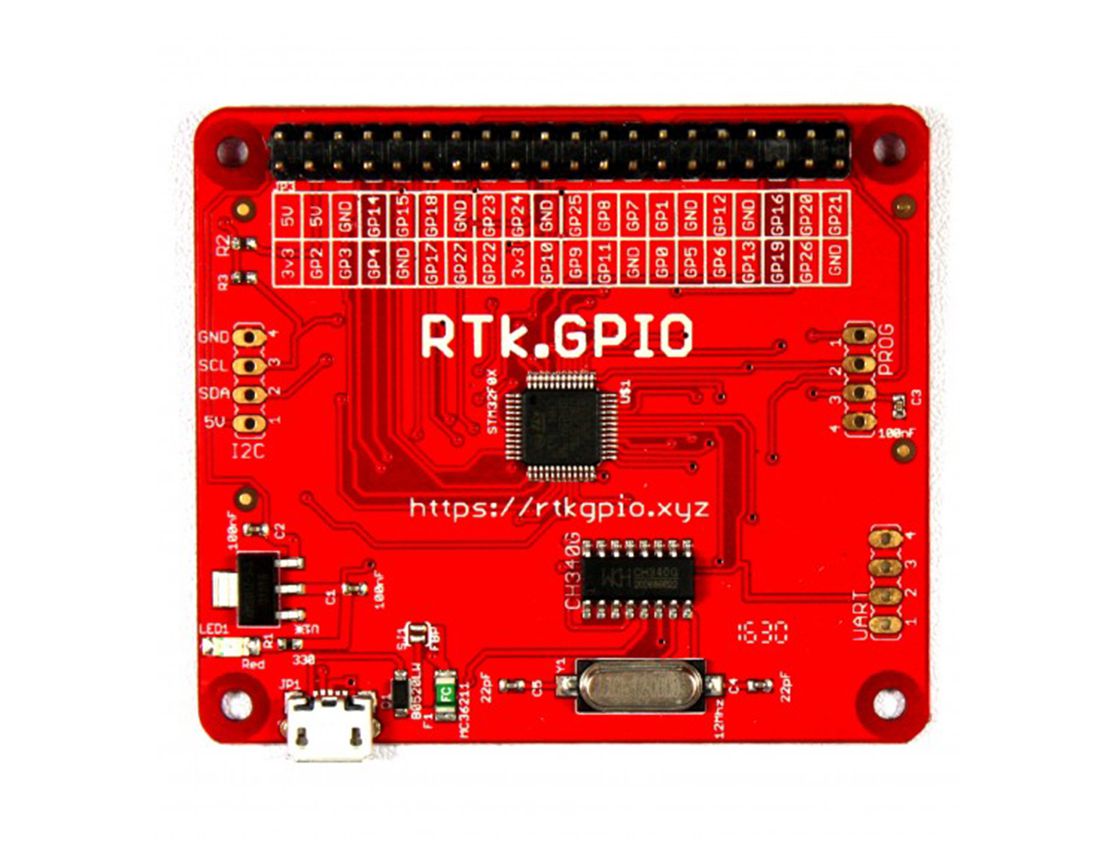
Plug in the RTk.GPIO
Next plug the RTk.GPIO if not already plugged in. Ensure the red power light turns on and that the computer detects it. If the red light does not turn on then first try another Micro USB Cable. If this still fails contact support at store@ryanteck.uk
Installing the RTk Library
Begin by opening up the terminal on Mac or Linux or on Windows open up the command prompt.
On Windows run
pip3 install RTk
If this does not work due to a file not found issue try
python -m pip install RTk
On Linux & Mac run
sudo -H pip3 install RTk