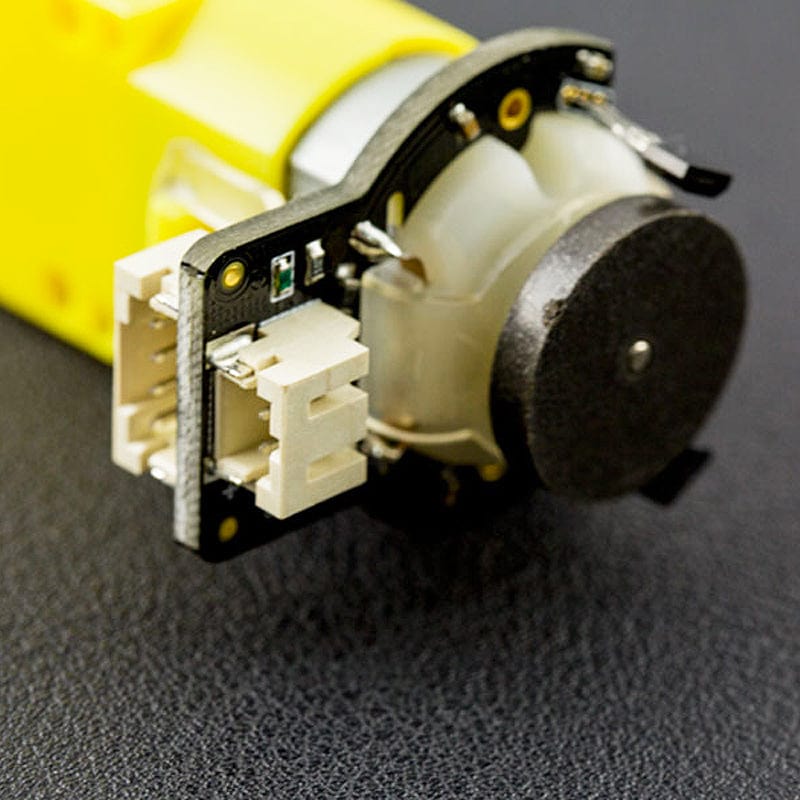
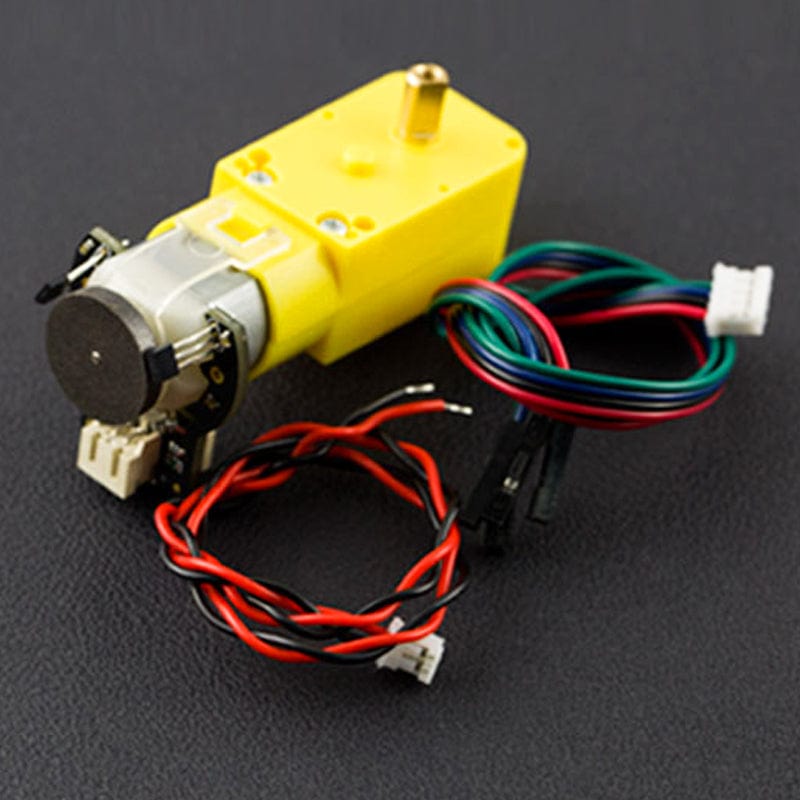
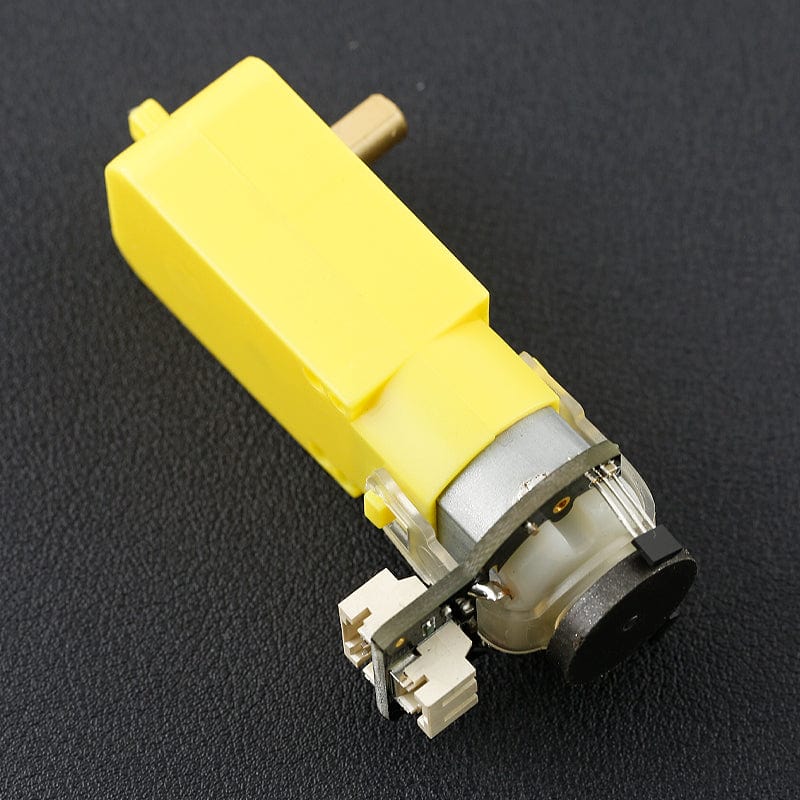
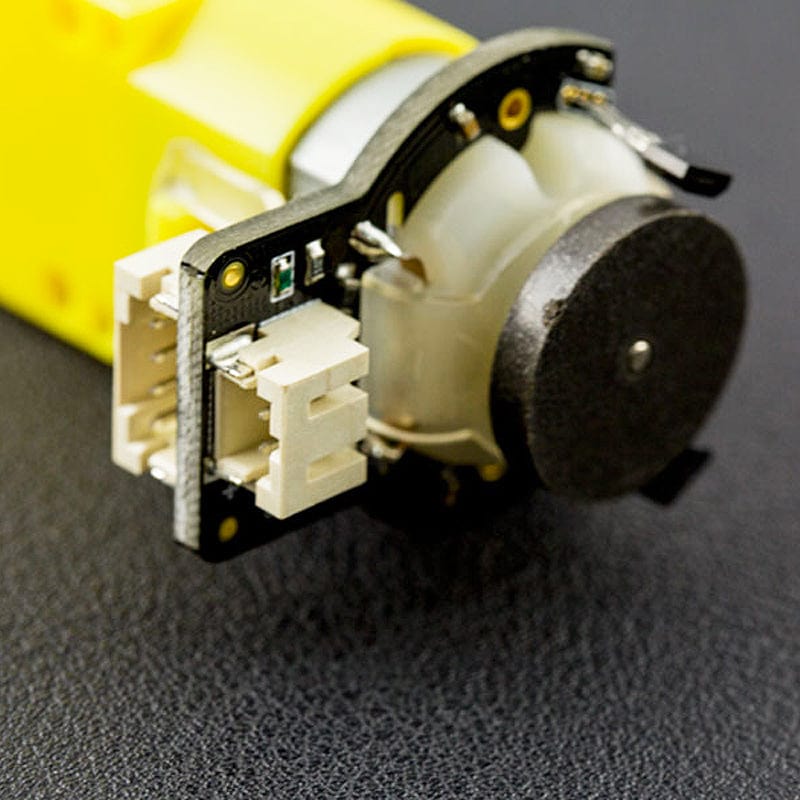
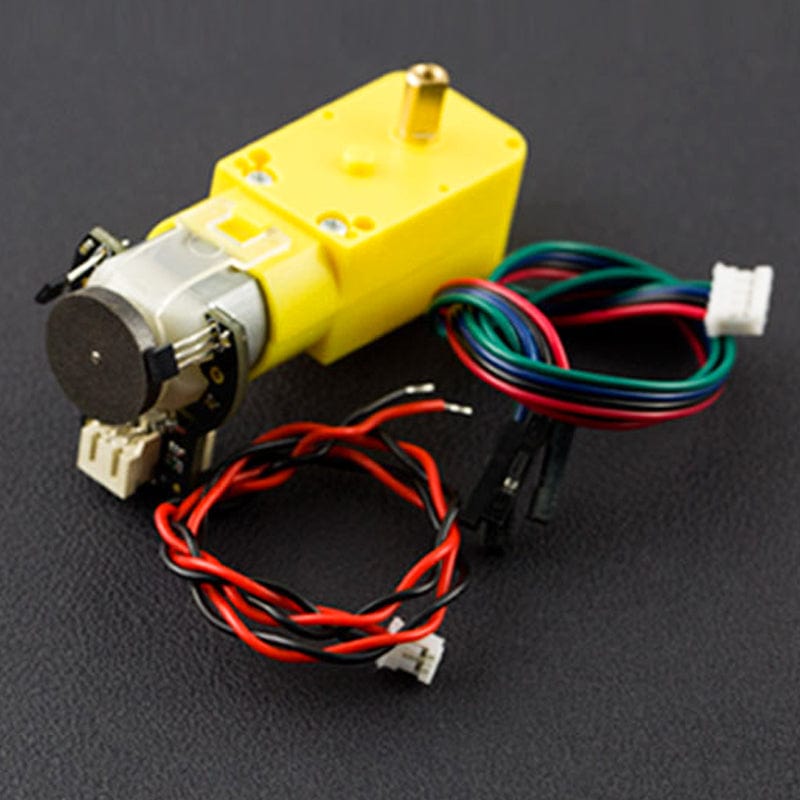
TT Motor with Encoder (6V 160RPM 120:1)
Price:
Sale price
£7.20
Stock:
Quantity:
Login / Signup
Cart
Your cart is empty



Your payment information is processed securely. We do not store credit card details nor have access to your credit card information.