
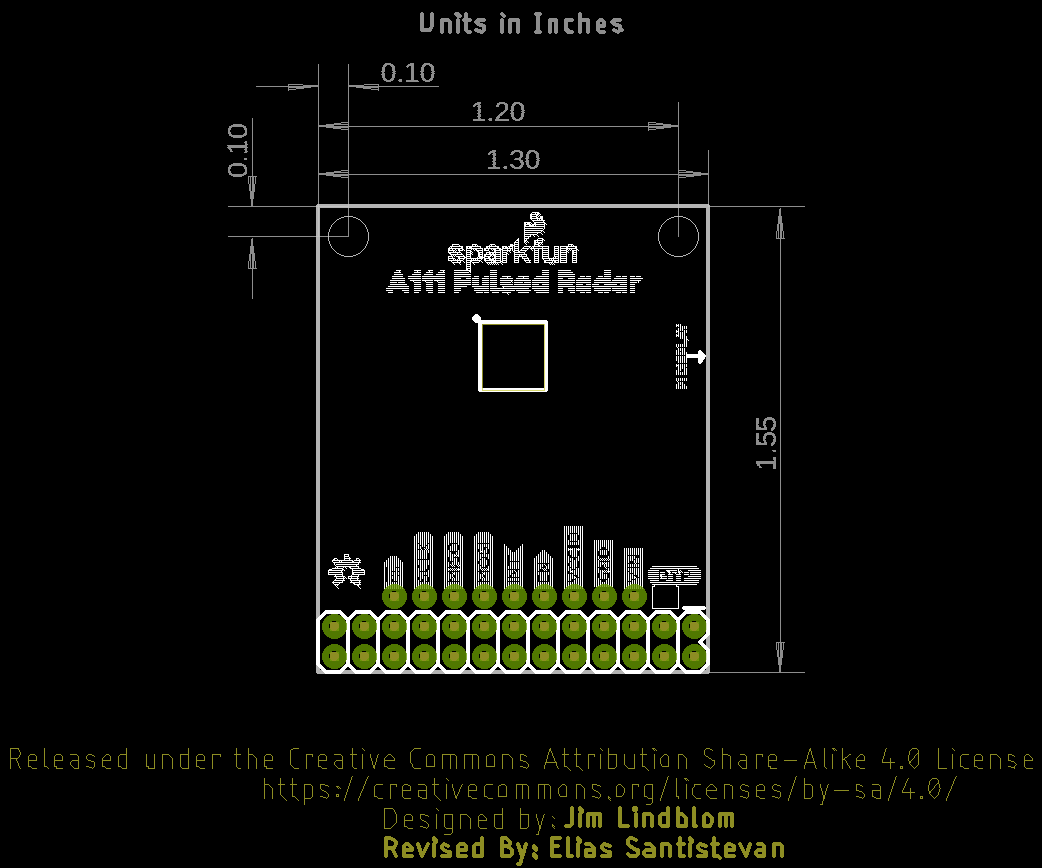
SparkFun Pulsed Radar Breakout - A111
Price:
Sale price
£59.40
Stock:
Quantity:
Login / Signup
Cart
Your cart is empty
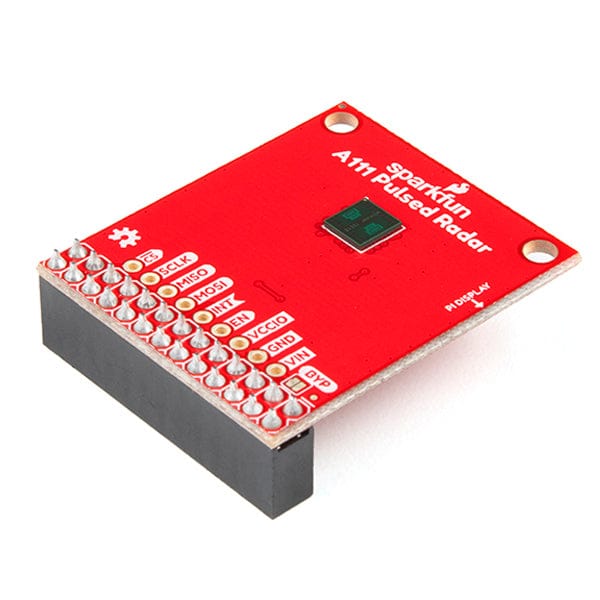
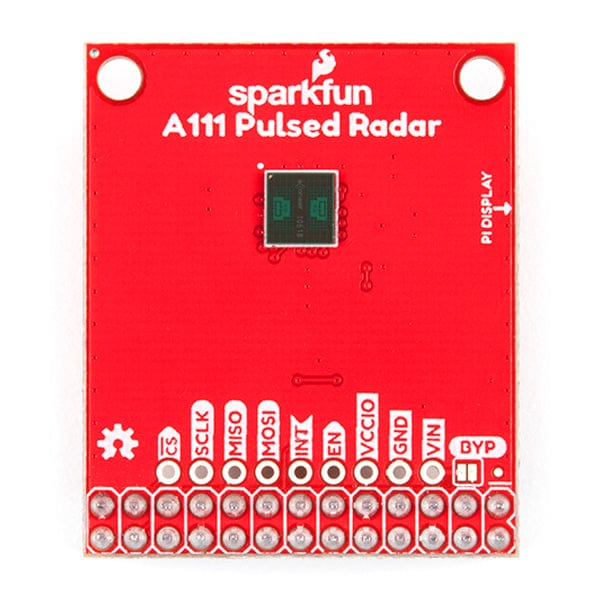
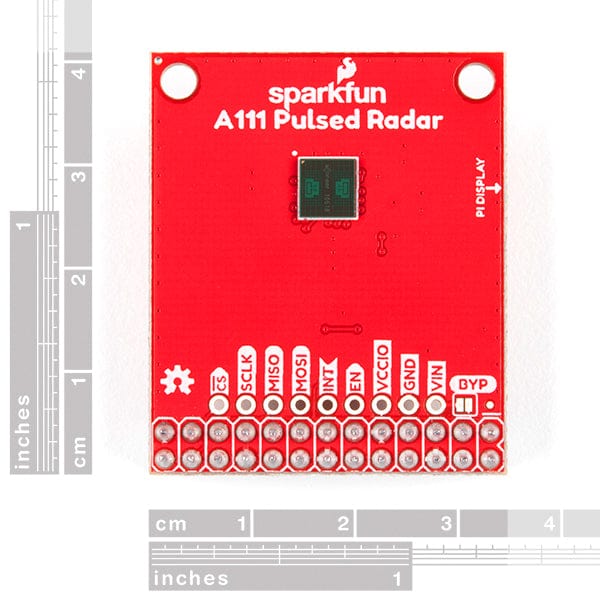
Does your project require high-precision, cutting-edge distance measurement? Or maybe speed, motion, or gesture-sensing? We're not talking about simple ultrasonic or even infrared here, but 60GHz radar! Well say hello to the SparkFun A111 Pulsed Radar Breakout! The A111 is a single-chip solution for pulsed coherent radar (PCR) and comes complete with an integrated antenna and an SPI interface capable of clock speeds of up to 50MHz. Though the A111's primary use case is distance-sensing, it also supports applications in gesture, motion, material, and speed-detection at distances of up to two meters.
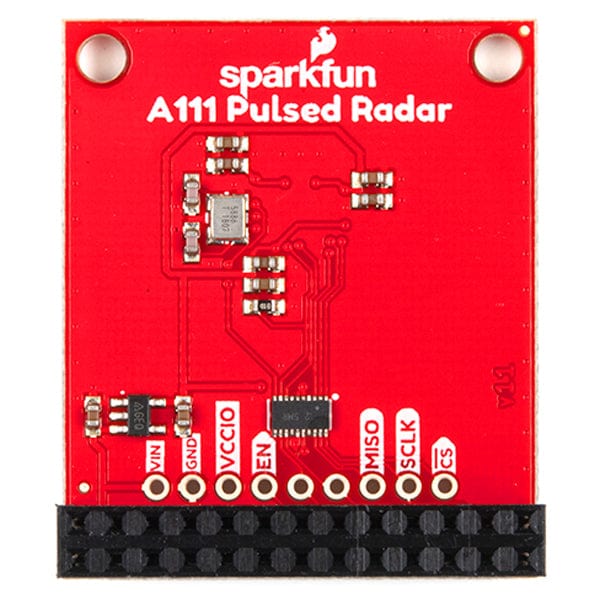
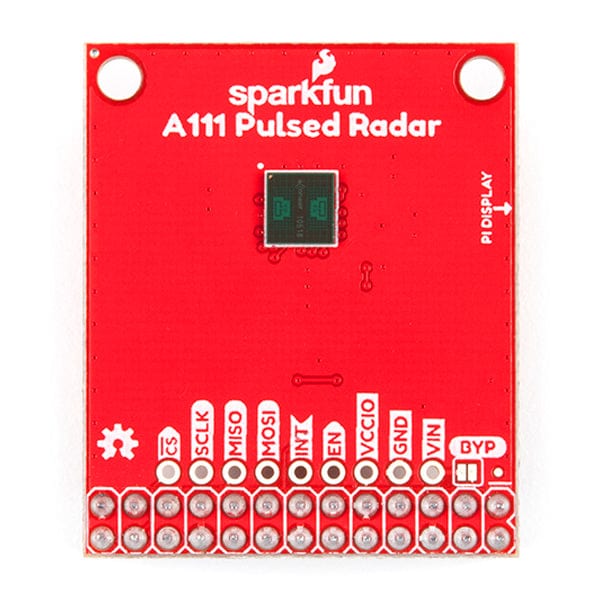
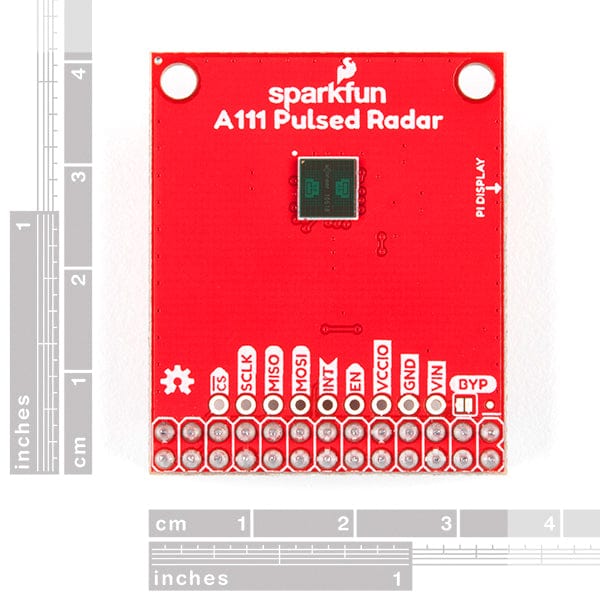
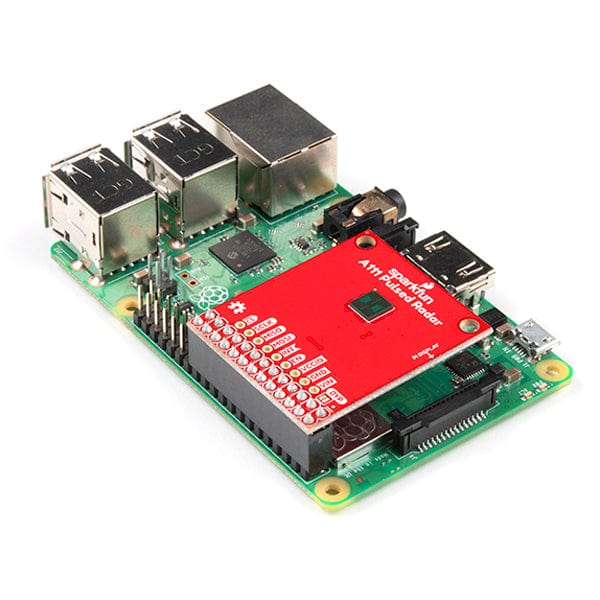
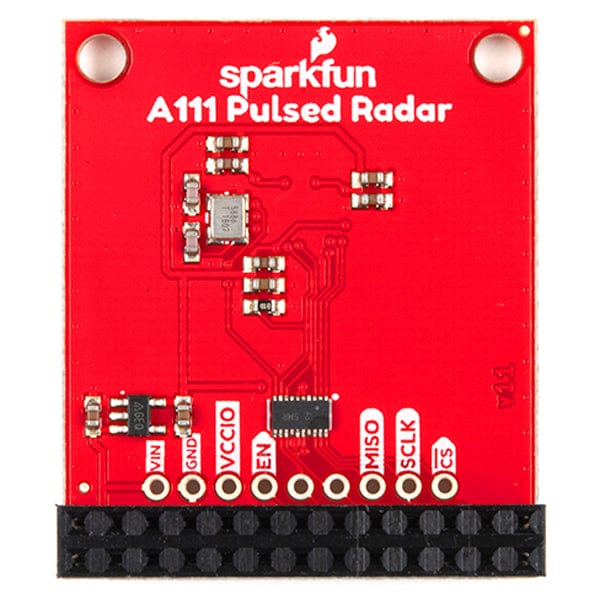
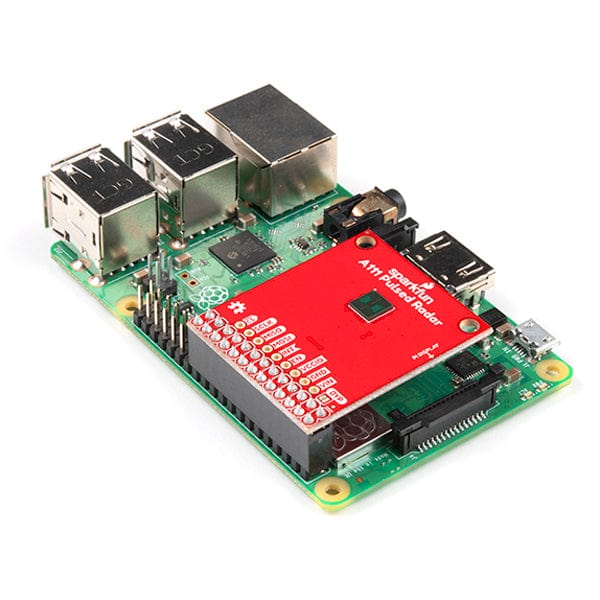
SparkFun Pulsed Radar Breakout for the A111 includes a 1.8V regulator, voltage-level translation, and it breaks out all the pins of the pulsed radar sensor to both 0.1-inch and Raspberry Pi-friendly headers. The Pulsed Radar Breakout is designed to sit directly on top of a Raspberry Pi but it doesn't span all 40 (2x20) pins of a Raspberry Pi B+ (or later), but the 26-pin -- 2x13 -- header should be compatible with any Pi.
Acconeer has developed a visualization tool written in Python that demonstrates data collection in real time. It's called the Acconeer Exploration Tool and is an incredible resource when first starting out with the A111 Pulsed Radar. As an example it will graph distance or presence sensing, giving you a count of the number of sweeps, which communication port (SPI or I2C) data is being sent through, and much much more. The tool supports both Windows and Linux and requires Python version 3.6 or later. This tool is available through their GitHub Repository, go on over a take a look!
Heads up! The A111 was designed to work with an ARMv7 to work at a minimum. We were able to get the sensor working on the Raspberry Pi 3, 3B+, and 4.
Note: The Raspberry Pi is NOT included
Your payment information is processed securely. We do not store credit card details nor have access to your credit card information.


{kind=link}