Smart Cutebot Pro for micro:bit
Price:
Sale price
£67.10
Stock:
Quantity:
Login / Signup
Cart
Your cart is empty



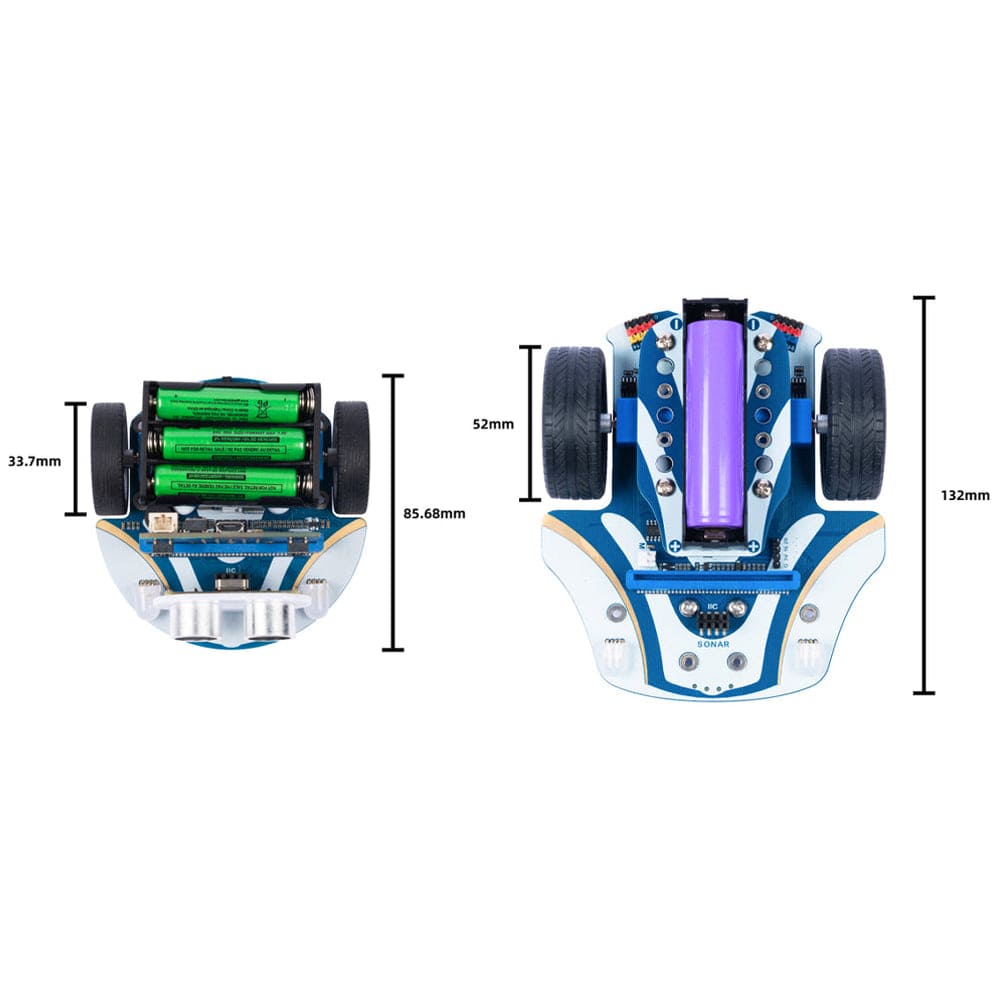
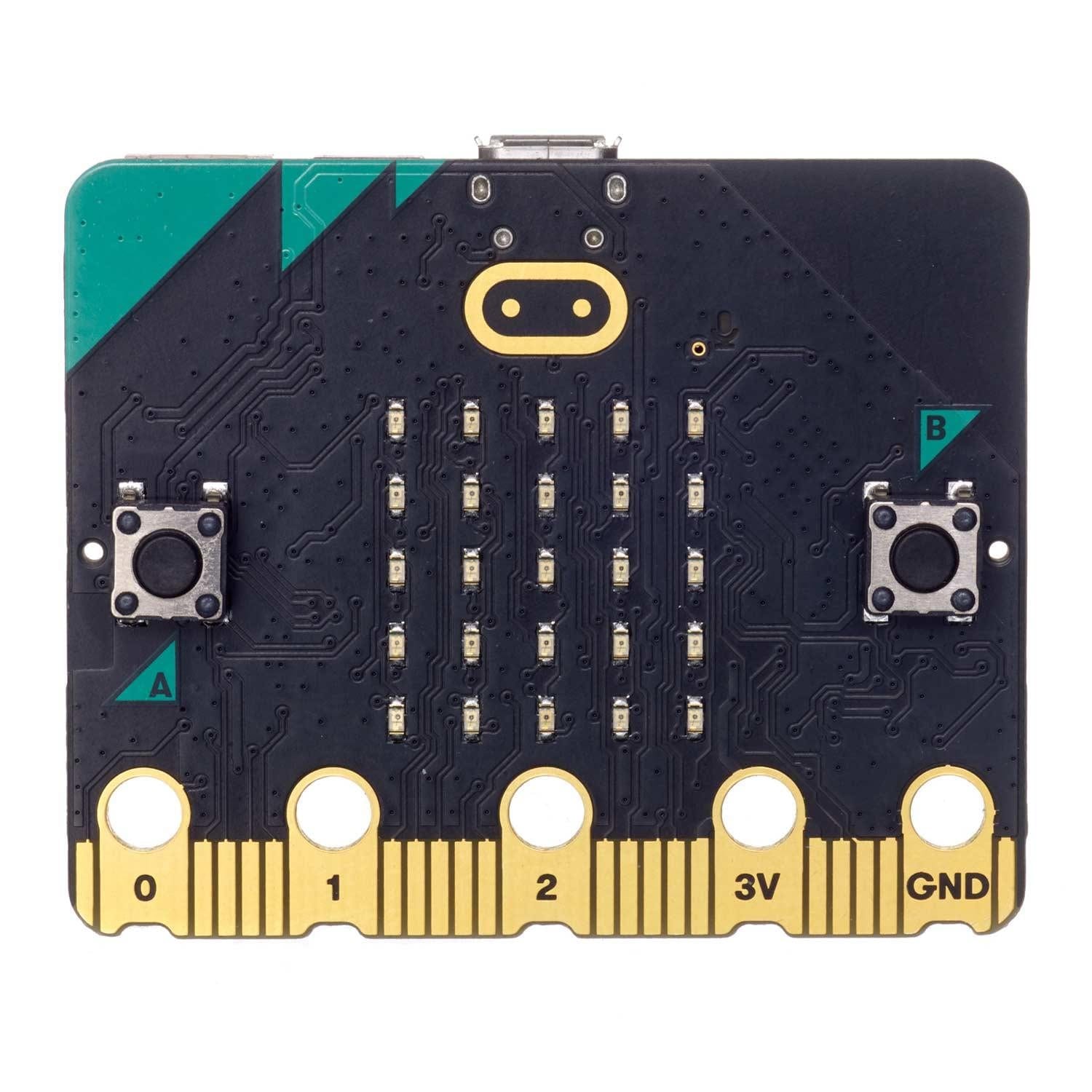







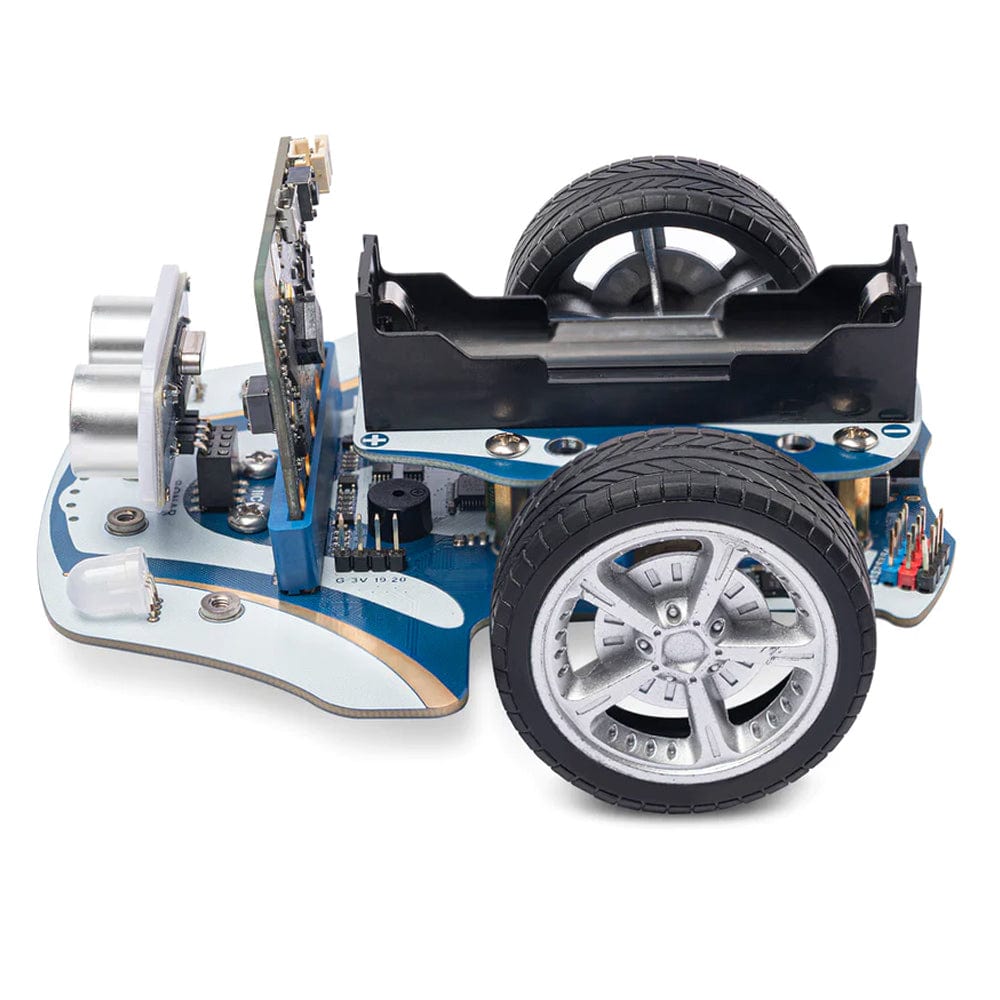
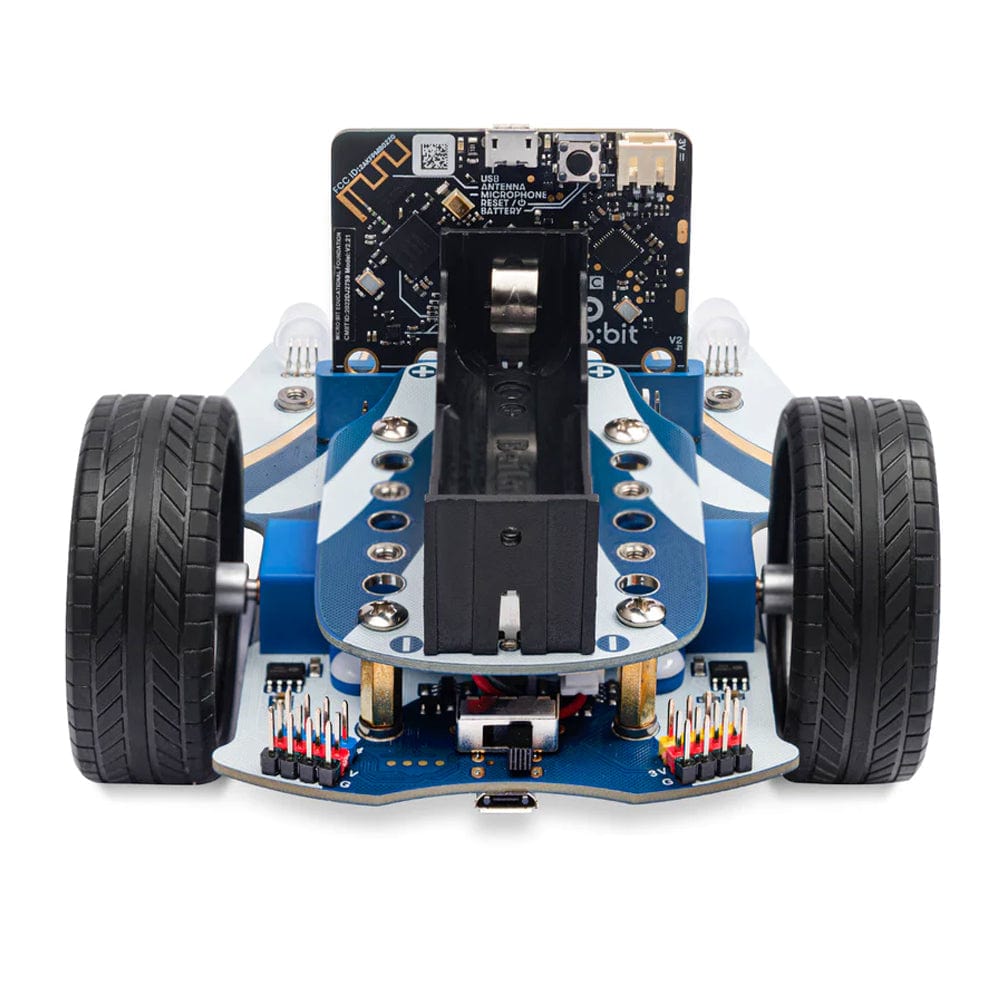
The Smart Cutebot Pro V2 is a programming robot car designed for the micro:bit board (not included). This improved model of the standard Cutebot comes fully assembled and uses an 18650 lithium-ion battery (not included) for power.
The robot includes a 4-way infrared sensor for precise line tracking and an encoder motor for accurate control of movement and angles. It also has a colourful LED rainbow light and an ultrasonic sensor for distance measurement and obstacle detection. The robot car offers multiple expansion interfaces, allowing for the addition of more hardware components.
The improvements in this model from the original cutebot, include a closed-loop motor for more precise driving, enhanced line-tracking sensors capable of identifying complex patterns like crossroads, and additional interfaces for attaching devices like mechanical arms. Design-wise, it has a larger body, increased motor torque, faster speed and wider tires for improved grip and smoother driving.
Note: Lithium Battery is not included.

| Items: | Parameters |
| Name: | Smart Cutebot Pro |
| SKU: | EF08292 |
| Power supply: | 18650 lithium battery |
| Charging current: | 1000mA |
| Charging time: | About 120min |
| Max. working voltage: | 4.2V |
| Rated working voltage: | 3.7V |
| Min. working voltage: | 3.3V |
| The output voltage from motor connections: | 3.3V |
| Max. output current from motor connections: | 0.2A |
| The output voltage from servo connections: | The current battery voltage |
| Max. output current from servo connections: | 3A |
| The output voltage from the 10 ports: | 3.3V |
| Max. output current from 10 ports: | 3A |
| Onboard devices: | 2 Rainbow lights; 2 Headlights; 1 Buzzer; 1 Infrared receiving module 4x Infrared line following sensors |
| Servo connections: | 4x |
| Motor connections: | 1x |
| GPIO connections: | 4x |
| IIC Ports: | 2x |

Your payment information is processed securely. We do not store credit card details nor have access to your credit card information.