Pololu Micro Gripper Kit with Position Feedback Servo
Price:
Sale price
£28.80
Stock:
Quantity:
Login / Signup
Cart
Your cart is empty



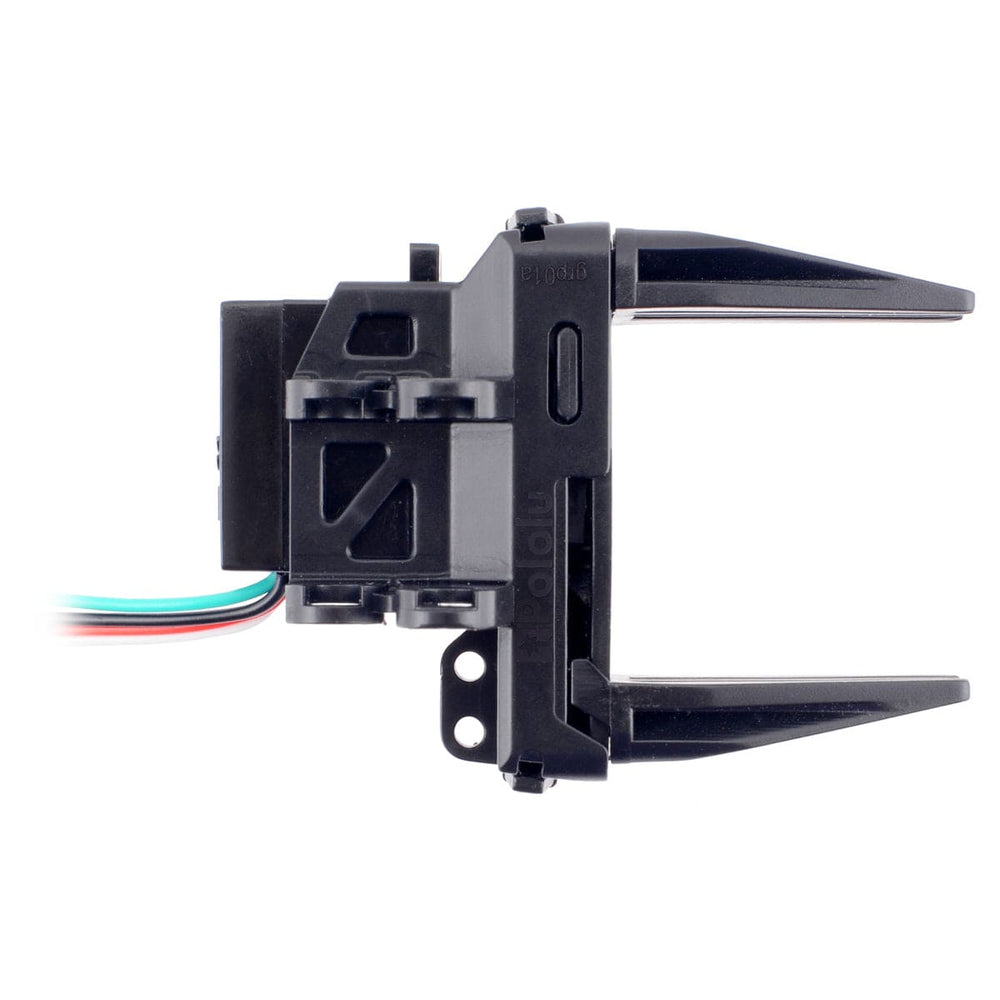

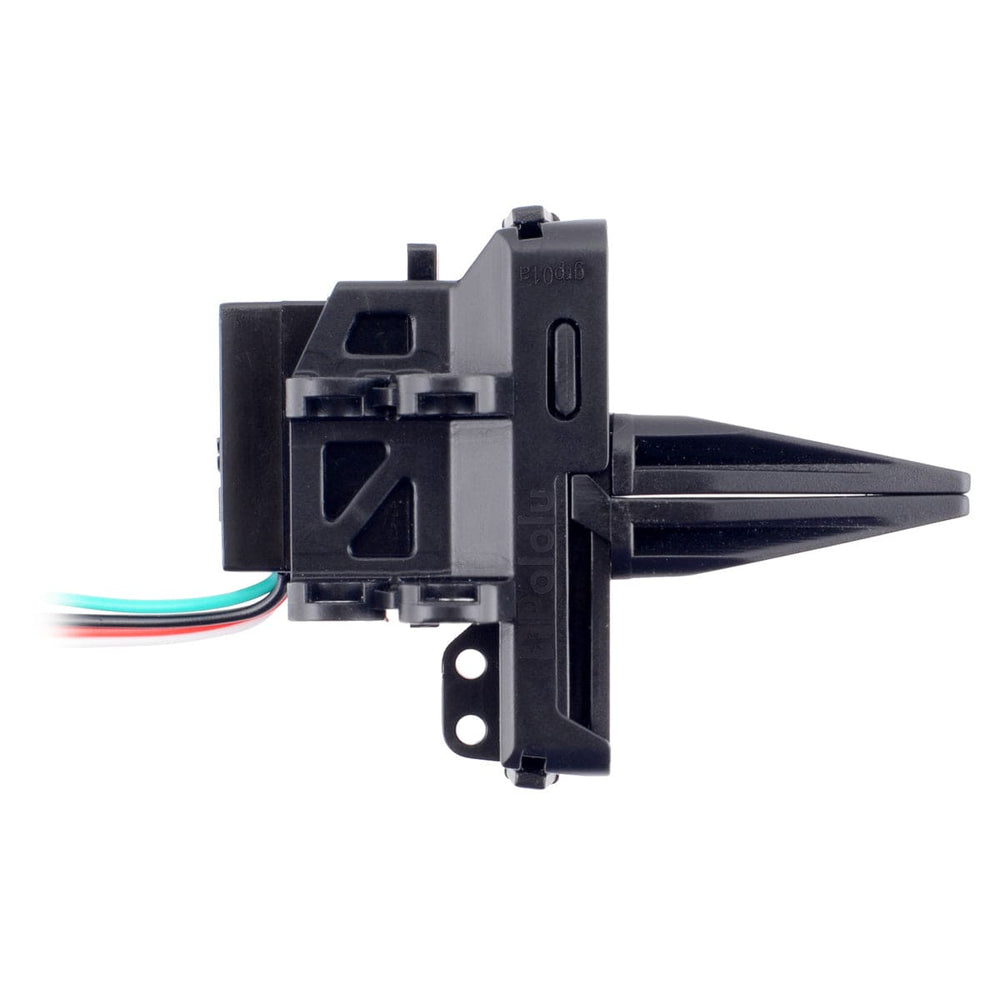
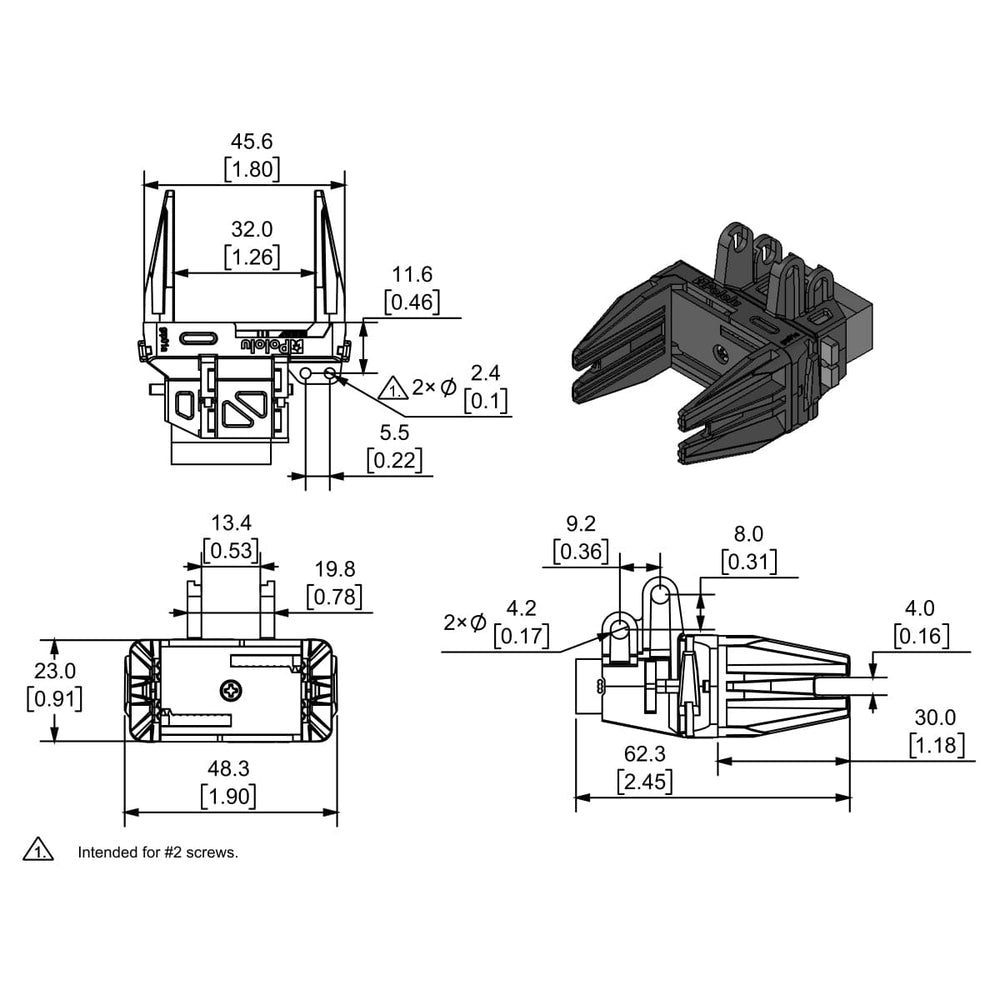

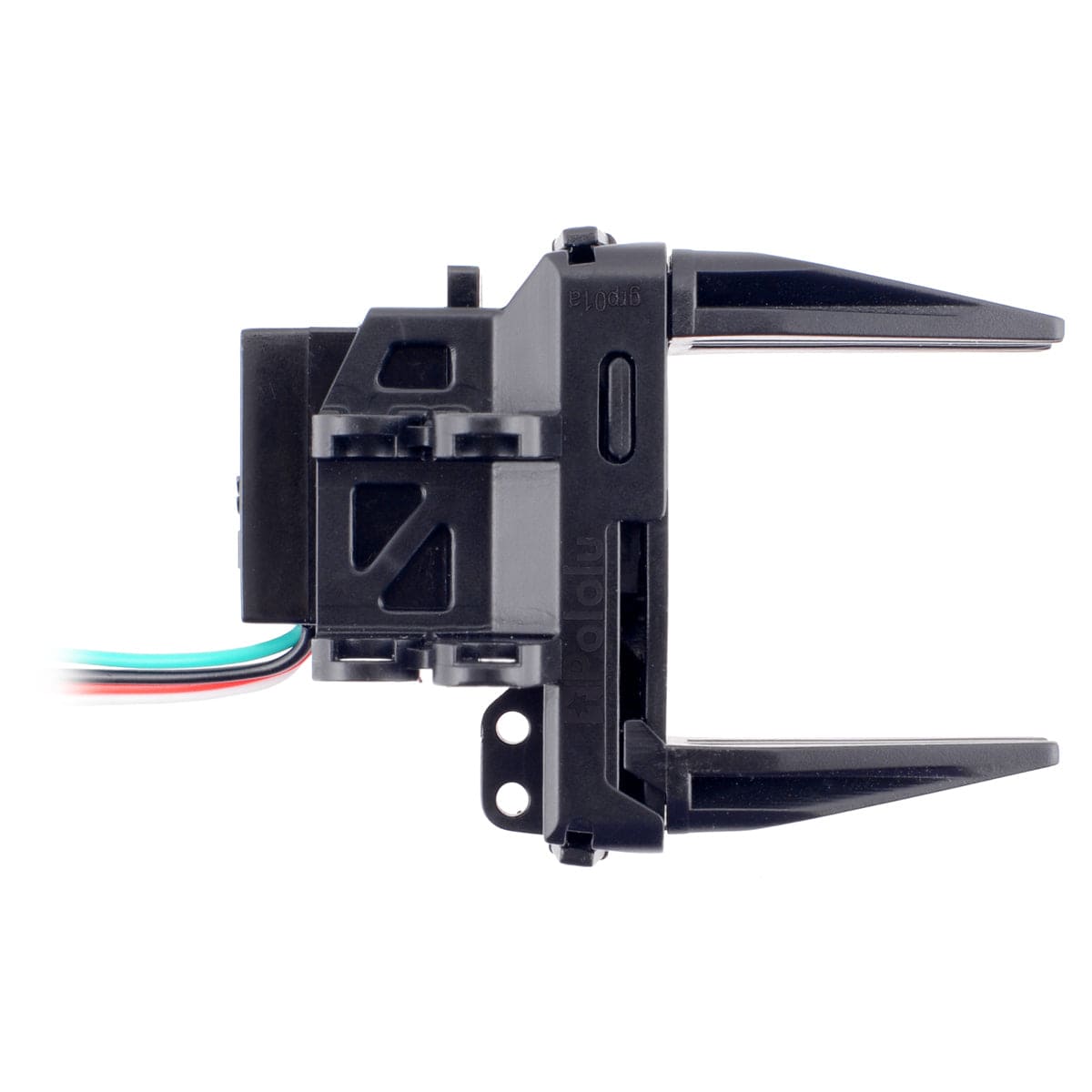
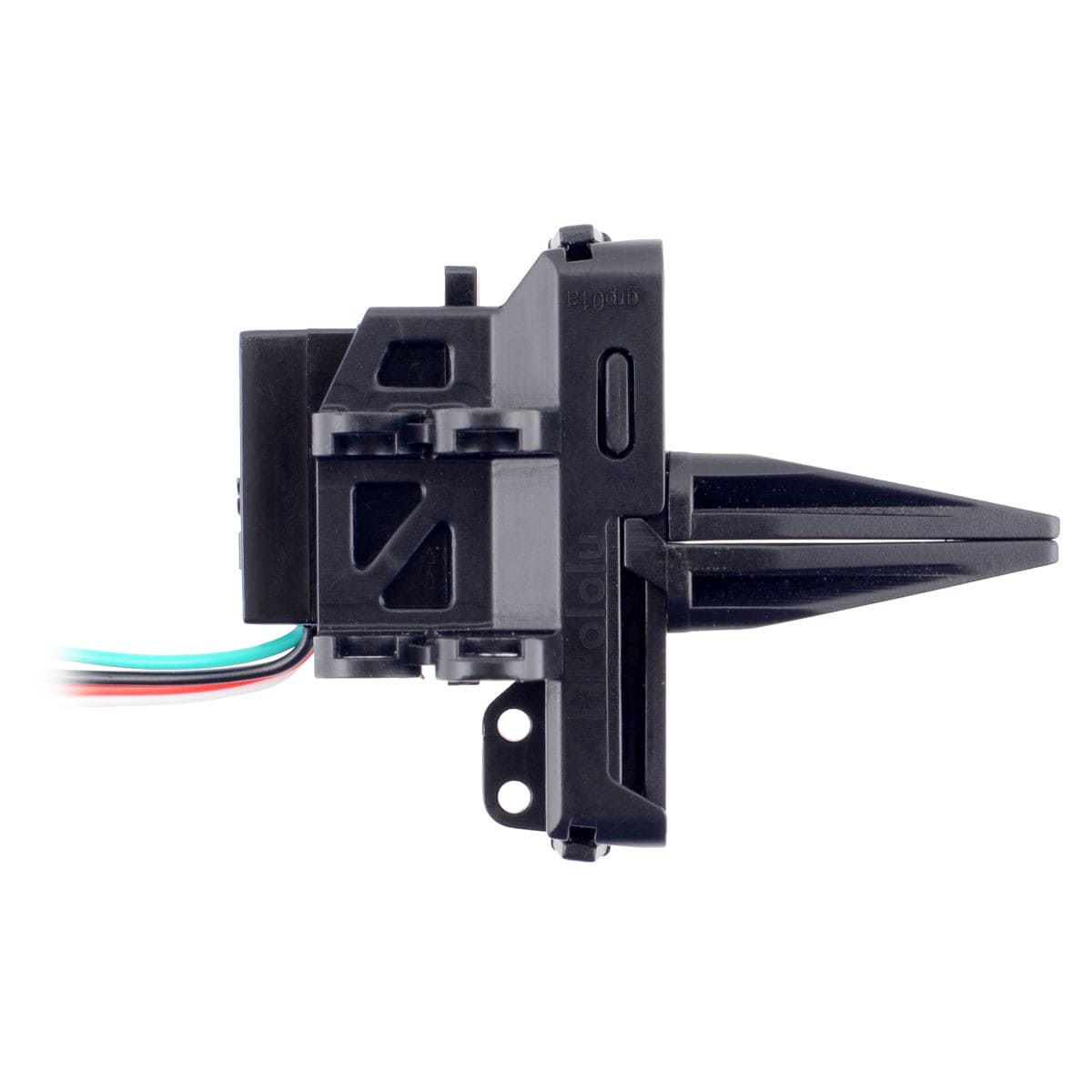
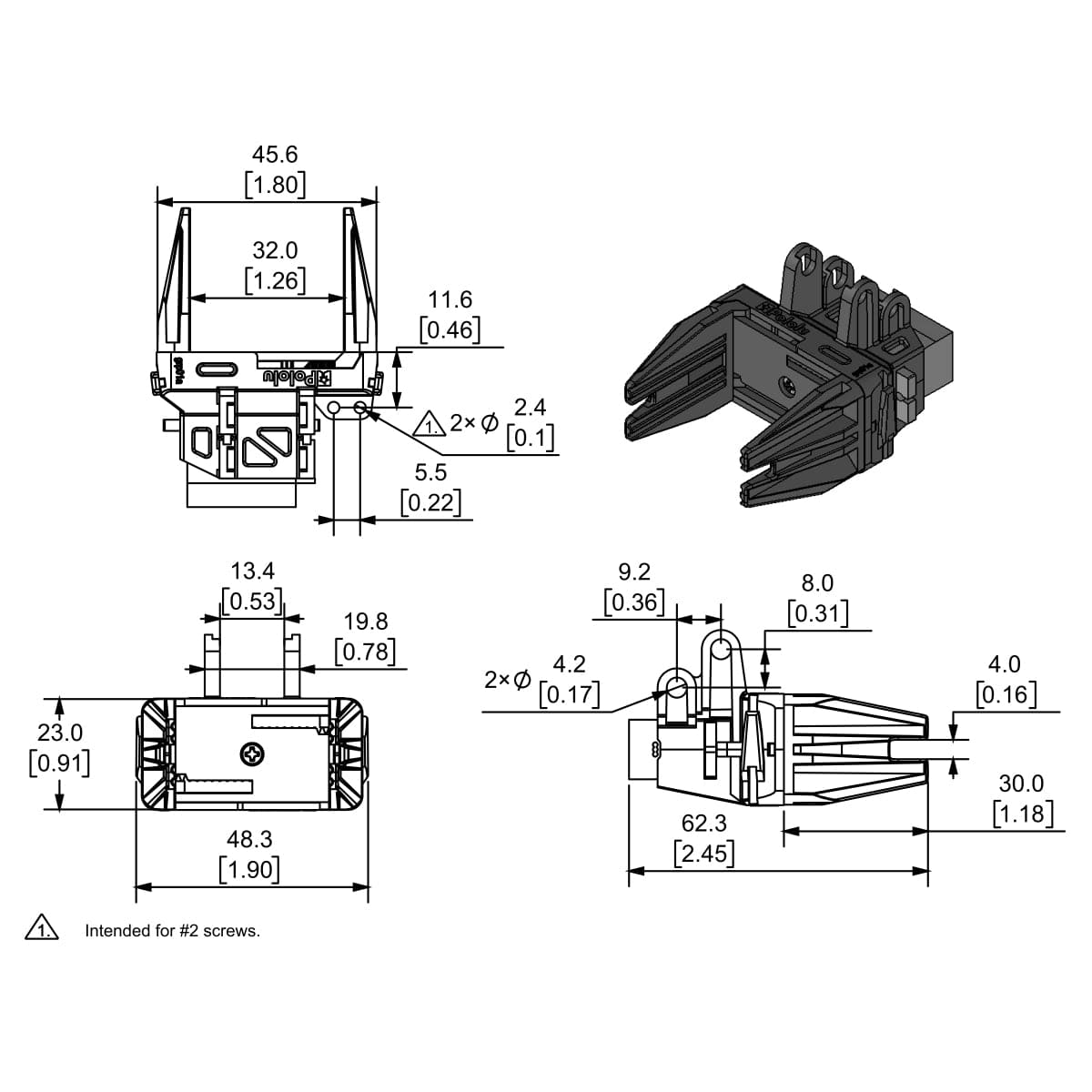
This small gripper uses a rack and pinion design with a servo-driven pinion and opposing racks to keep the gripper paddles synchronized and parallel to each other throughout its 32 mm range of motion.
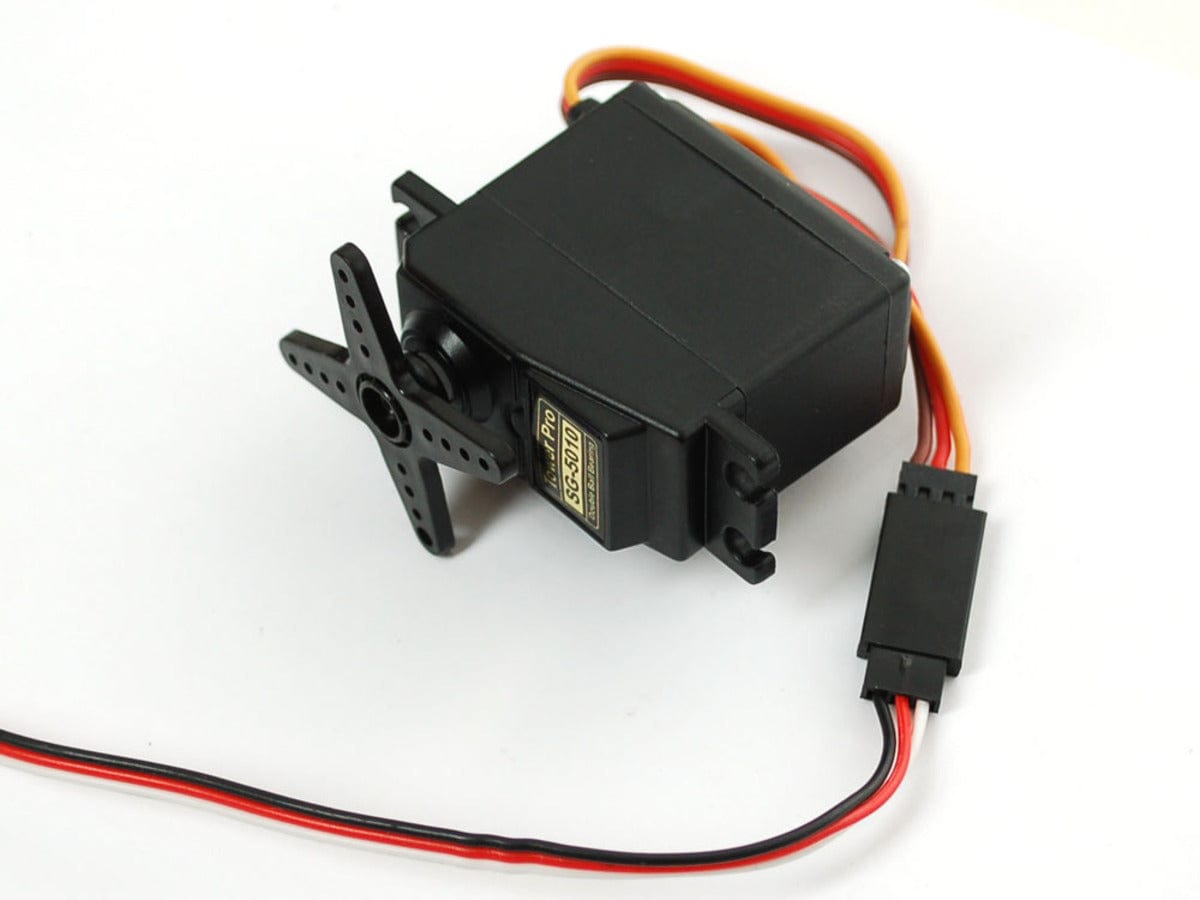
It includes a special micro servo with an additional wire that gives access to its feedback potentiometer, so you can track the actual position of the gripper paddles.
This is the same gripper used in the Robot Arm Kit for Romi, and assembly instructions can be found in the Robot Arm Kit for Romi User’s Guide.
Please note that the full range of the Micro Gripper requires servo control pulses between 0.5 ms (fully open) and 2.4 ms (fully closed), which is well beyond the standard hobby servo range 1 ms to 2 ms, so you should make sure your control electronics are capable of generating such signals if you care about getting the full range. Due to unit-to-unit variations in the servos, you might need to adjust these values for your particular gripper.
The servo is intended to be powered from 4.8V to 6V (nominal) battery packs or a suitable power supply in that general range, and it has a stall current of around 800mA at 6V. The feedback voltage ranges linearly from around 0.5V (fully open) to 2.2V (fully closed), meaning that there is an approximately 1:1 correspondence between servo position in microseconds and the feedback voltage in millivolts.
This product is a kit, and assembly is required.
Your payment information is processed securely. We do not store credit card details nor have access to your credit card information.