PiStep2 - Quad Stepper Motor Controller for Raspberry Pi
Price:
Sale price
£12.60
Stock:
Quantity:
Login / Signup
Cart
Your cart is empty
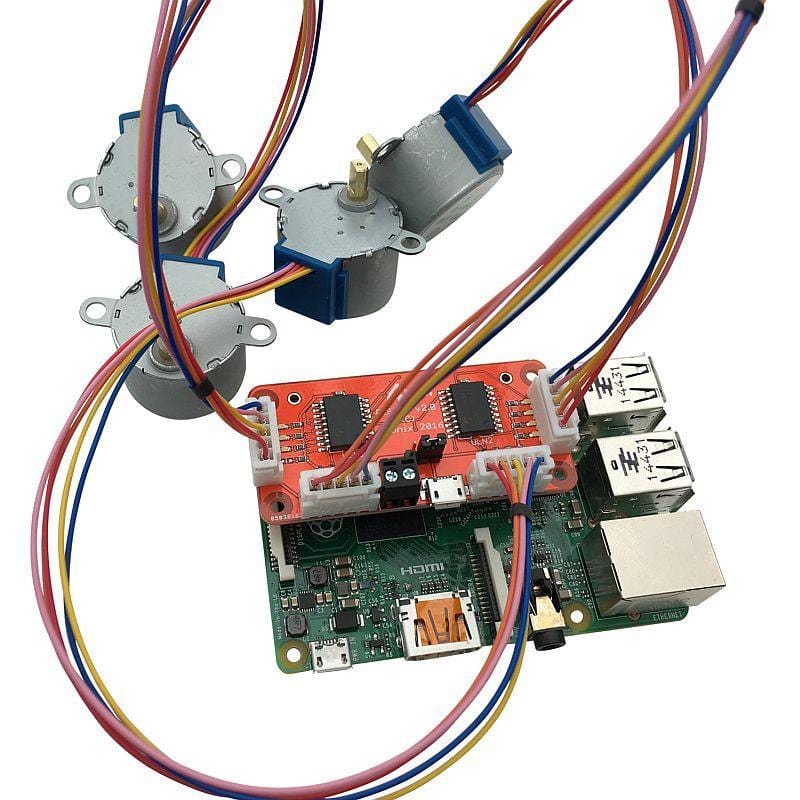
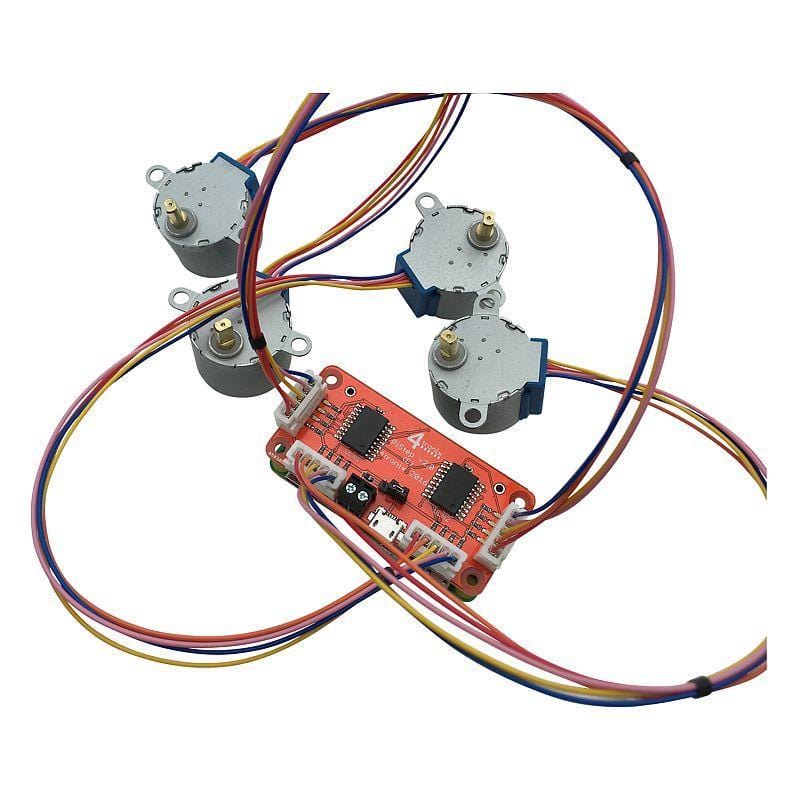


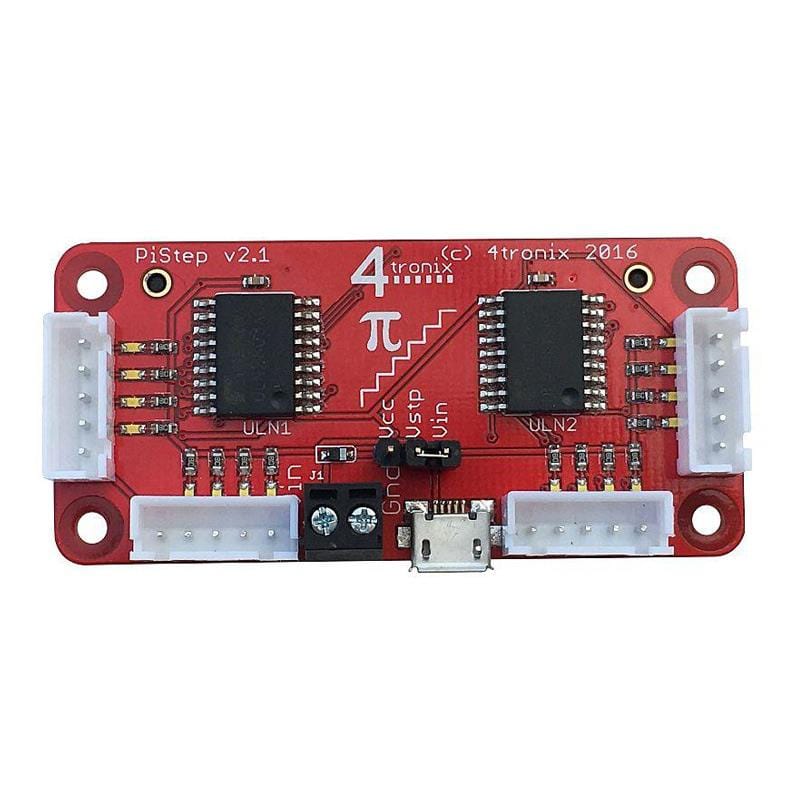
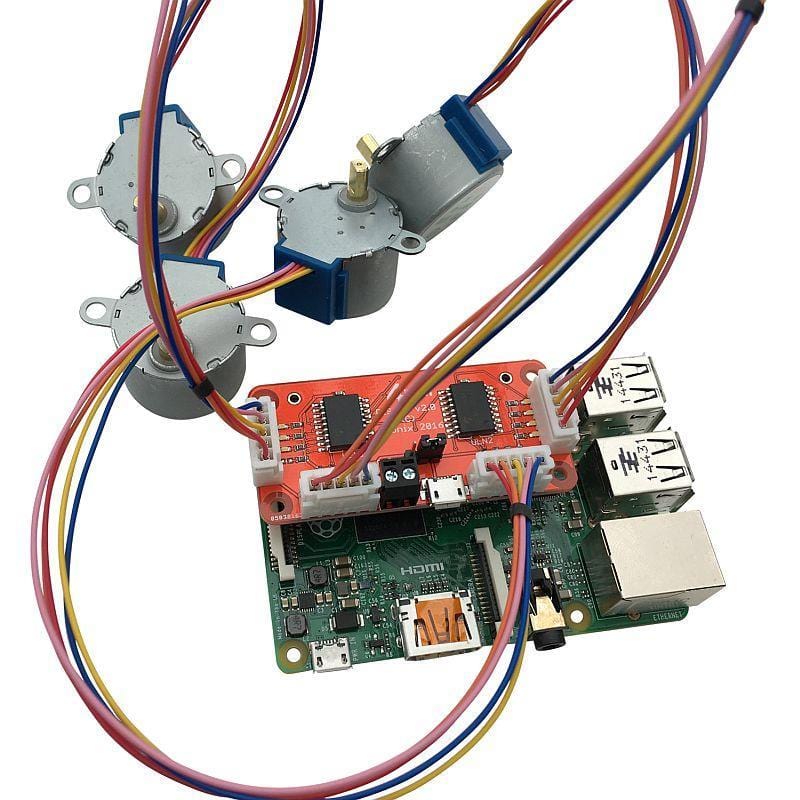
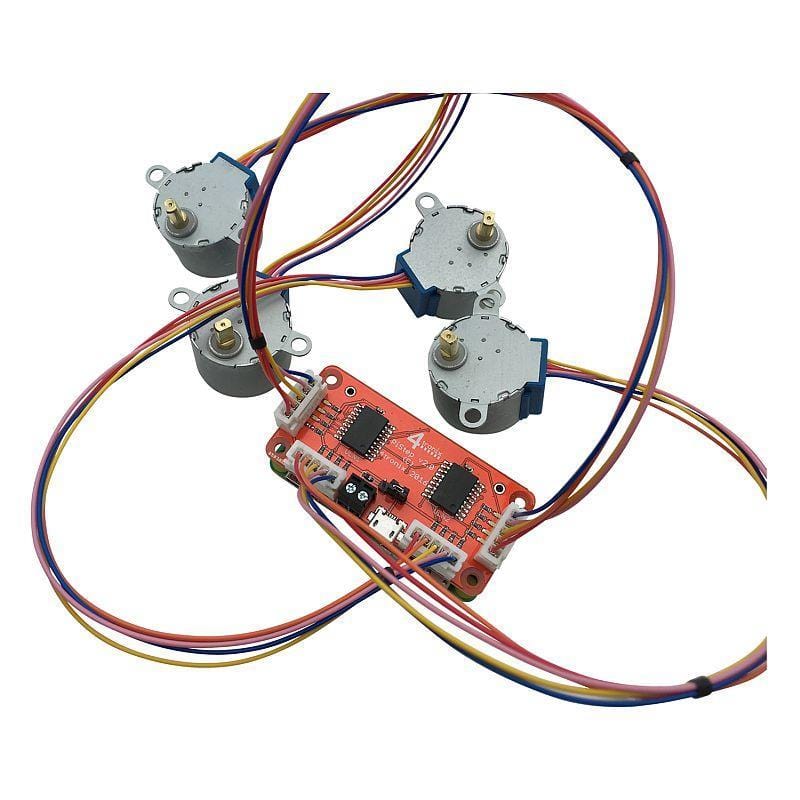
The PiStep2 can drive four stepper motors with a Raspberry Pi and comes fully Assembled - no soldering required!
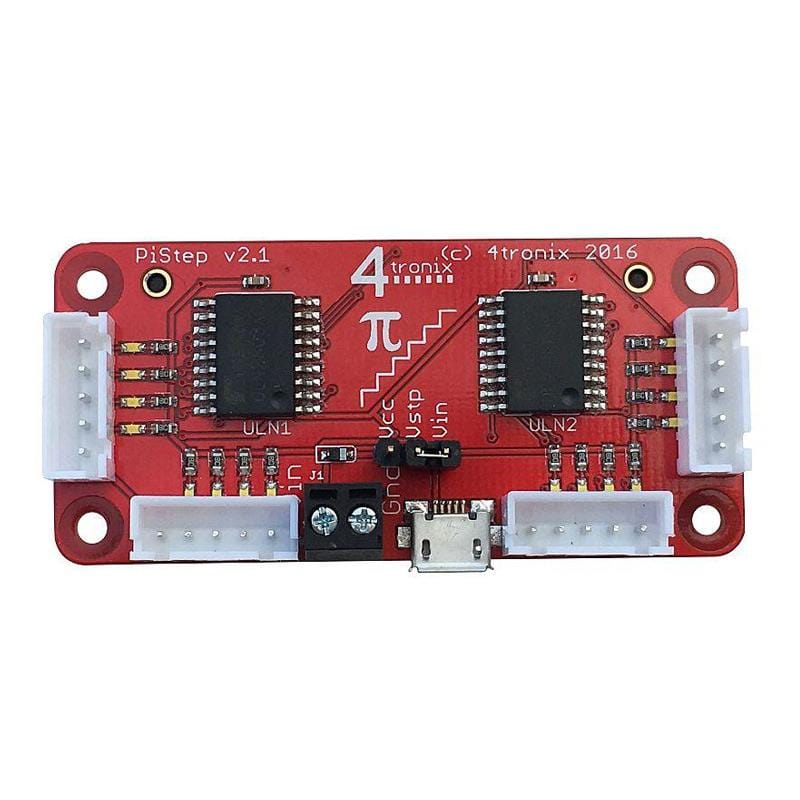
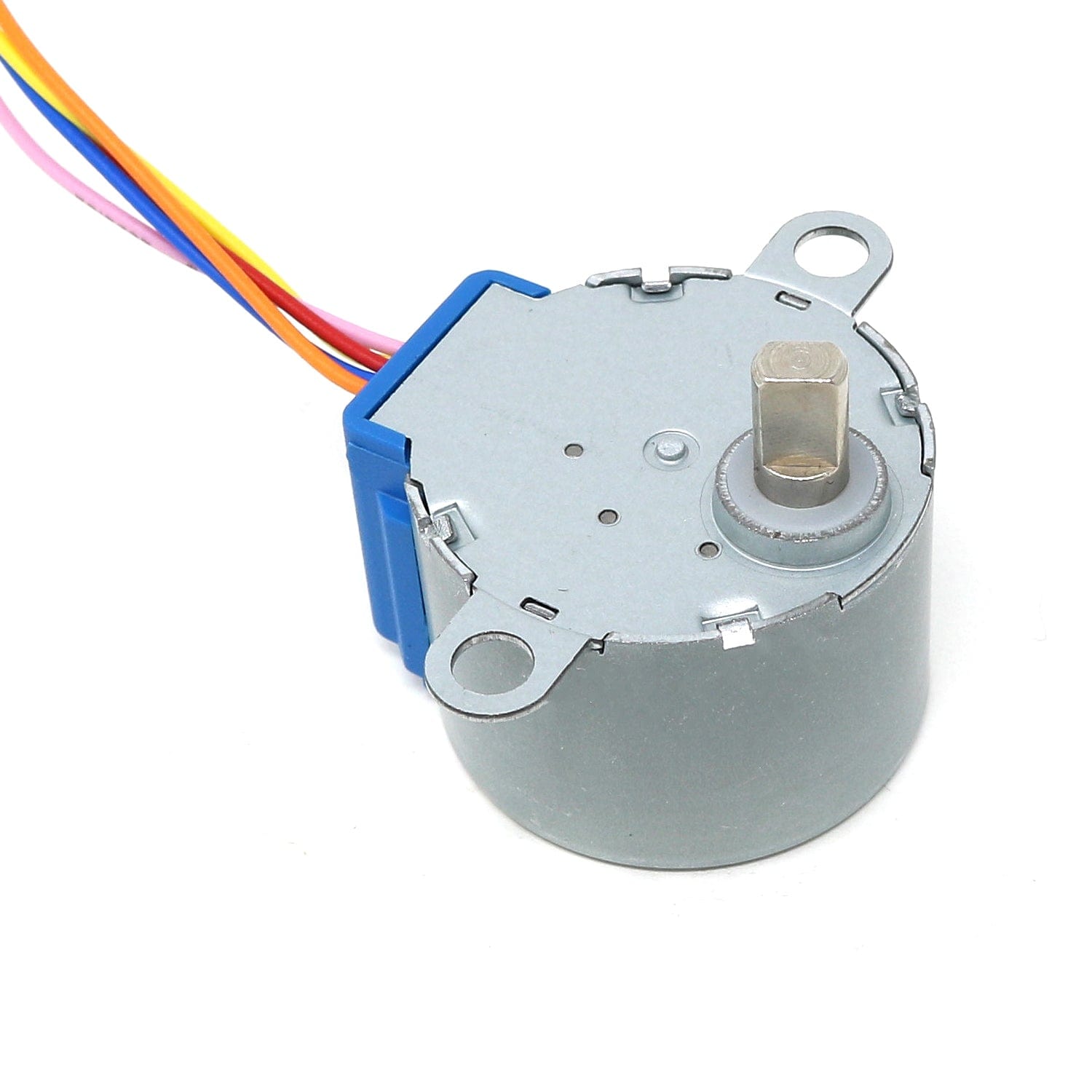
The HAT works with UniPolar (5-pin) stepper motors and each pin has an associated white LED so you can see the stepper signals going through. Great for debugging!
Compatibility
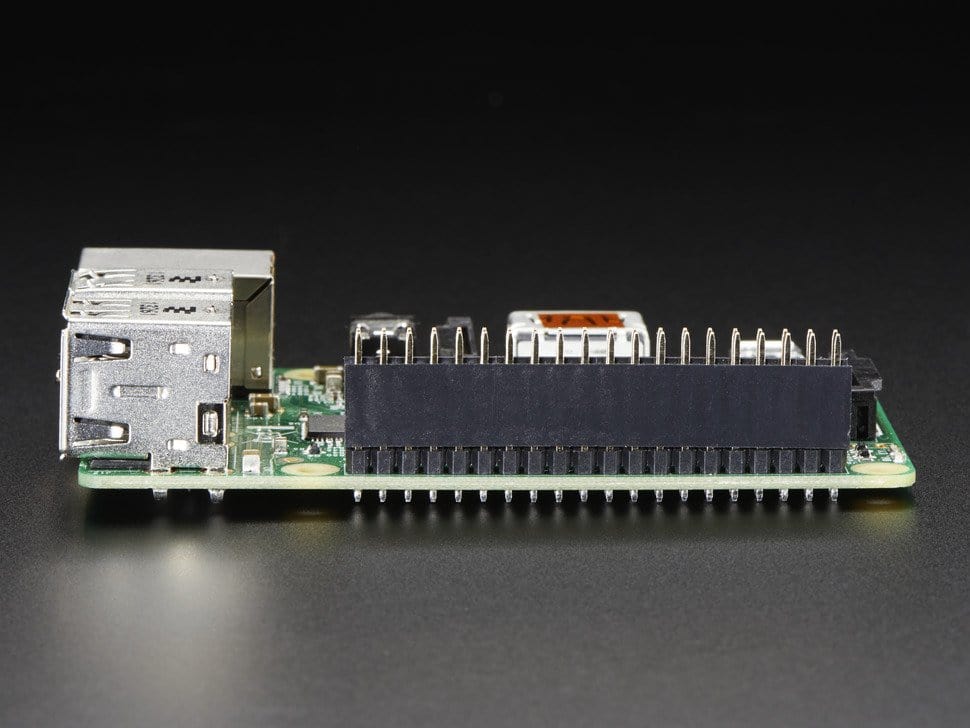
** the Raspberry Pi 4/3B+ have a POE connector that collides with one of the motor connectors on this board. We recommend using a GPIO riser with these boards.
Power Options
Each pin has an associated white LED so you can see the stepper signals going through
Power Supply Alternatives
Python Programming
Please see the excellent example here for some pointers. You will need to change the pin numbers as above and also change the speed so it steps at a visible rate. You may also want to remove the print statements to speed it up. The lines underlined below are changed from the original to operate Motor A.
# Use BCM GPIO references
# instead of physical pin numbers
GPIO.setmode(GPIO.BCM)
# Define GPIO signals to use
# Pins 18,22,24,26
# GPIO24,GPIO25,GPIO8,GPIO7
StepPins = [17,18,27,22]
# Set all pins as output
for pin in StepPins:
print "Setup pins"
GPIO.setup(pin,GPIO.OUT)
GPIO.output(pin, False)
# Define some settings
StepCounter = 0
WaitTime = 0.01
Note: Stepper motors (optional extra) and Raspberry Pi not included
Your payment information is processed securely. We do not store credit card details nor have access to your credit card information.