PicoBorg - Quad Motor Controller with Soldered Wires [Discontinued]
Price:
Sale price
£13.50
Login / Signup
Cart
Your cart is empty
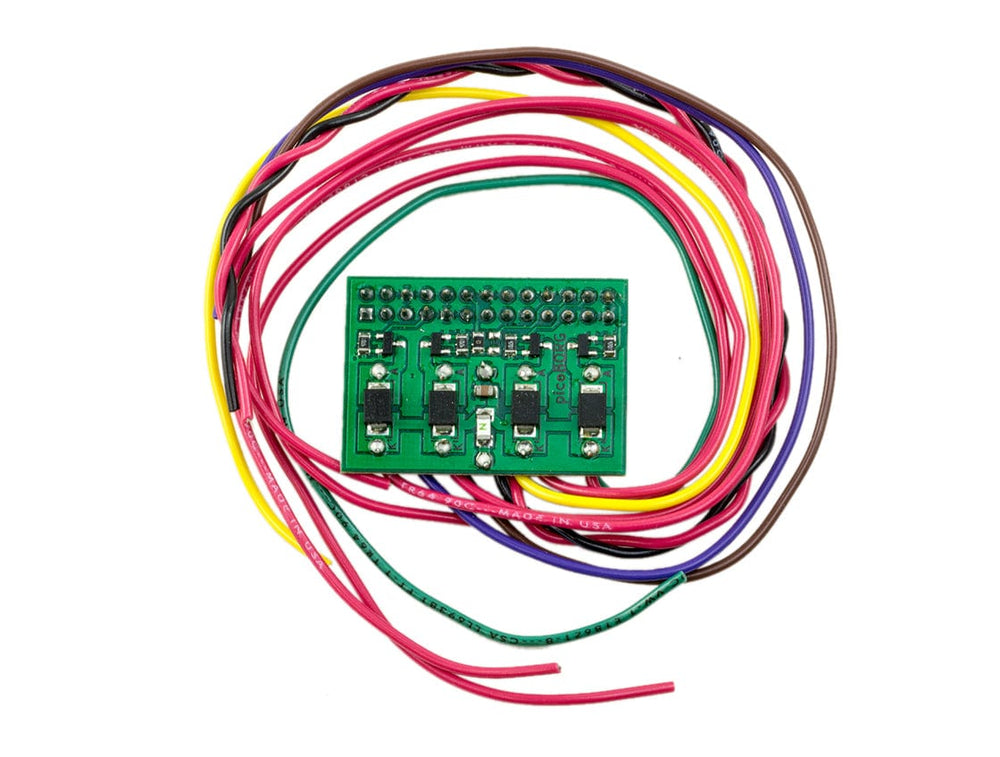
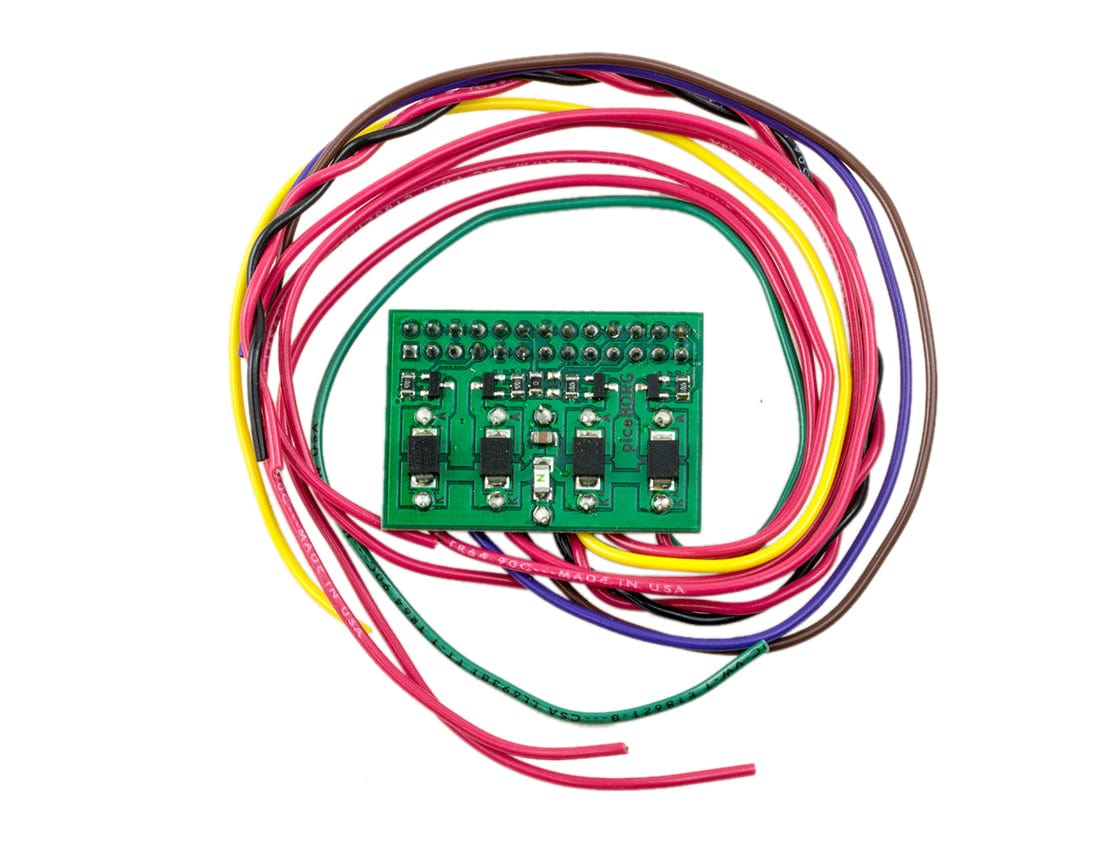
The PicoBorg is an ultra compact motor controller for the Raspberry Pi!
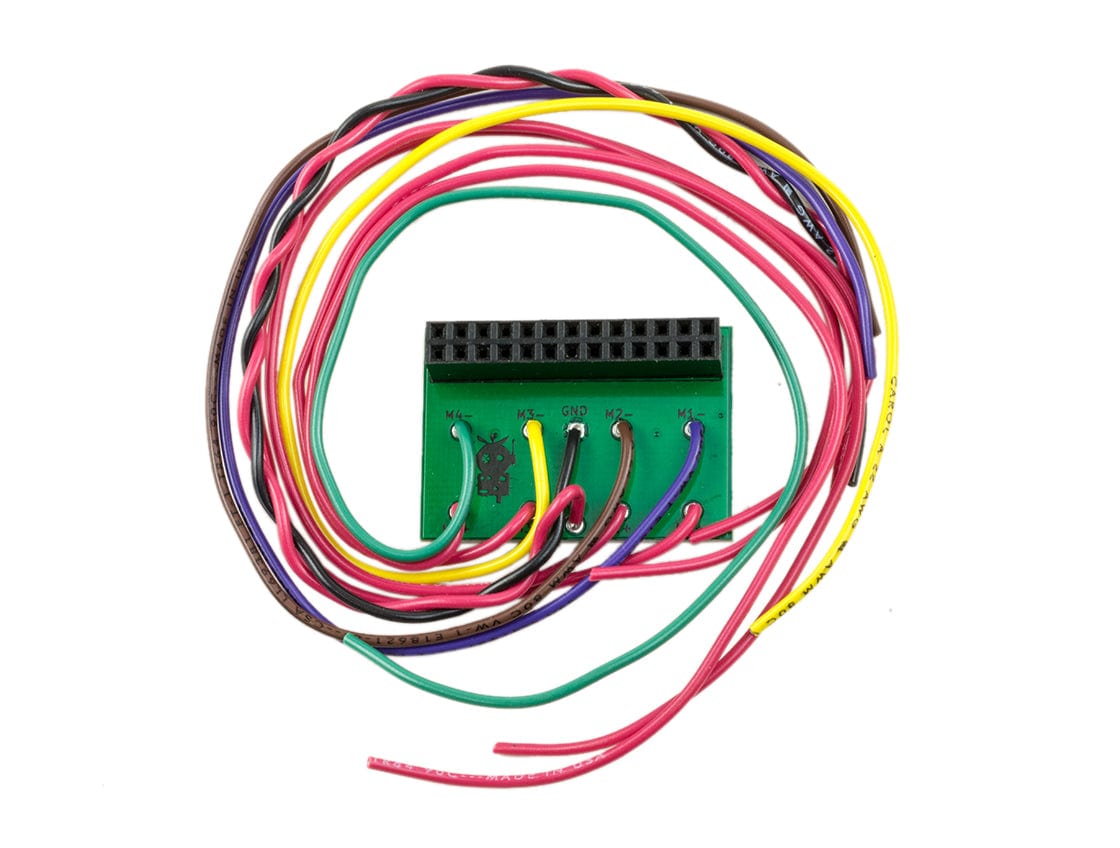
With PicoBorg, you can turn on and off fans, motors, solenoids or relays from your Raspberry Pi. There are 4 low side drivers, so you can turn on and off 4 devices, and one device is connected to the Pi's PWM pin, so you can vary the speed of that motor! Motor control is accessed via a simple GUI, which can be installed by following the PicoBorg installation instructions.
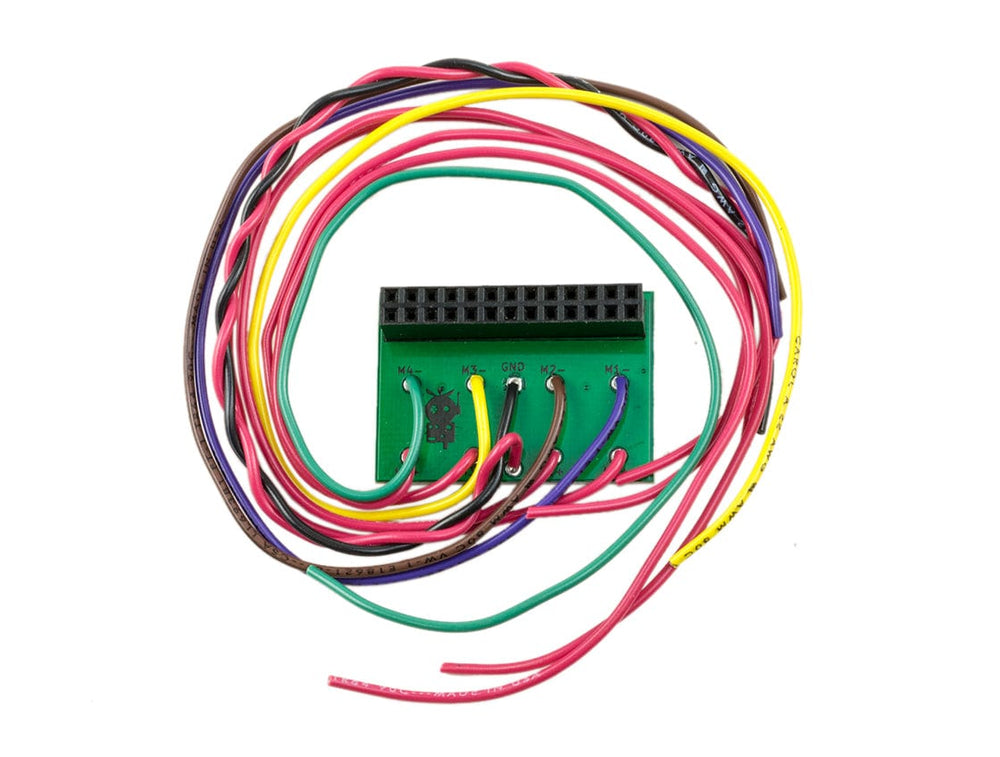
Motor power is not taken directly from the Raspberry Pi, so there's no risk of your Pi dropping out. Instead, the PicoBorg utilises a battery pack to drive the motors; meaning you're not restricted to 5V motors, in fact you can drive ANY motors up to 20V!
This version has wires pre-soldered! We also stock a version without pre-soldered with wires!
The PicoBorg is perfect for any small motor project, for example:
The PicoBorg Features:
Your payment information is processed securely. We do not store credit card details nor have access to your credit card information.