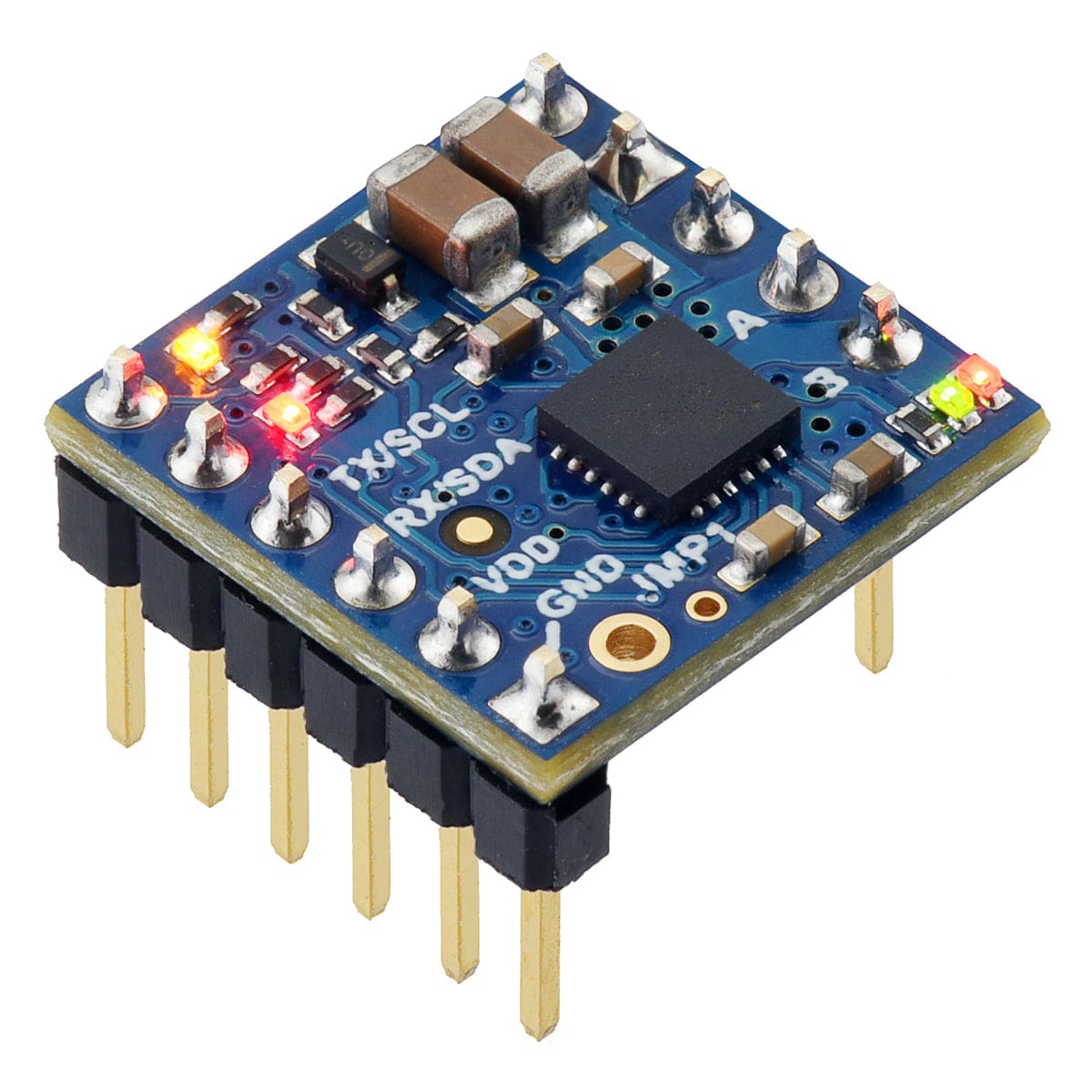
Motoron M1T256 Single I²C Motor Controller (Pins Pre-soldered)
Price:
Sale price
£17.30
Stock:
Quantity:
Login / Signup
Cart
Your cart is empty






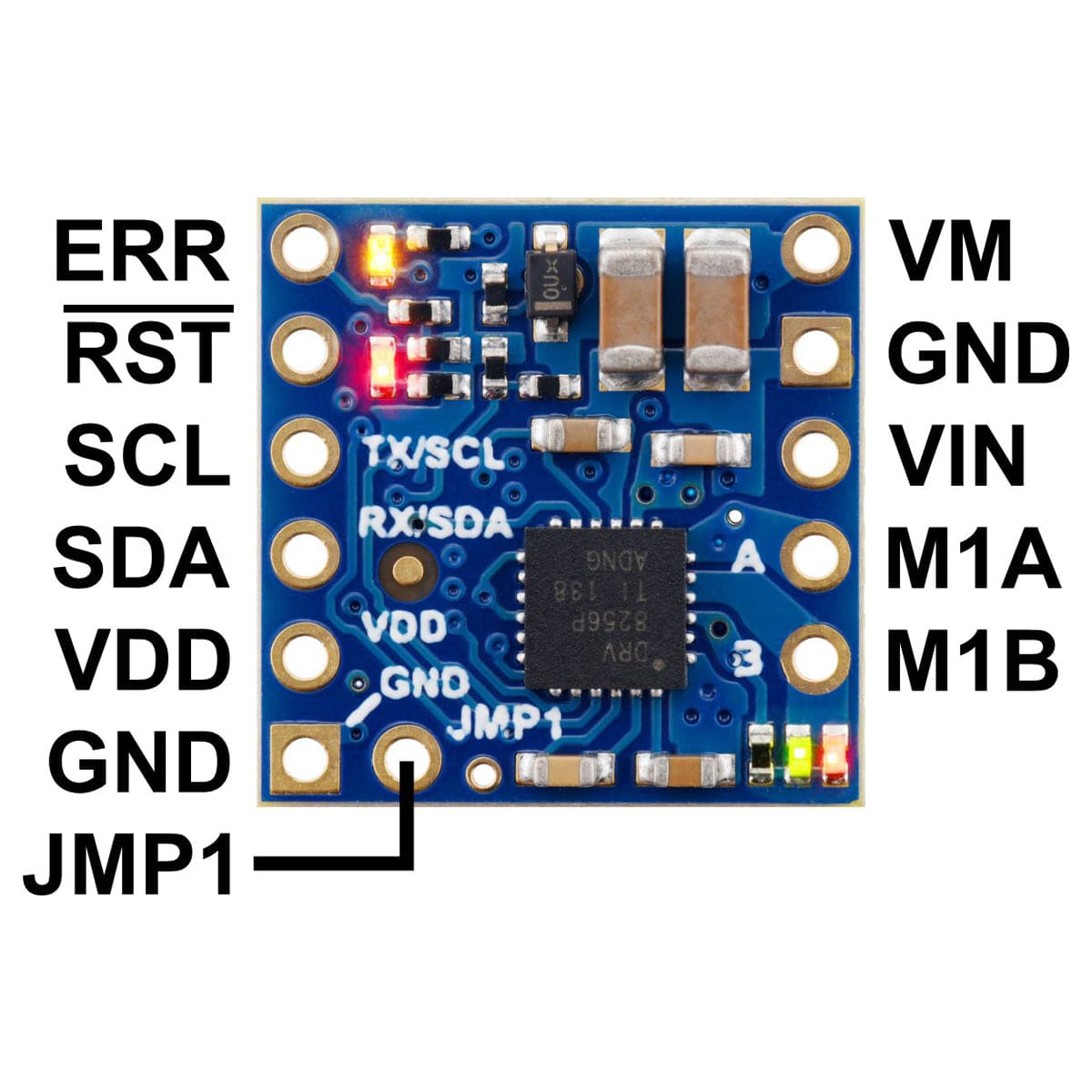
The Motoron M1T256 controller makes it easy to control a single bidirectional, brushed DC motors using an I²C interface.
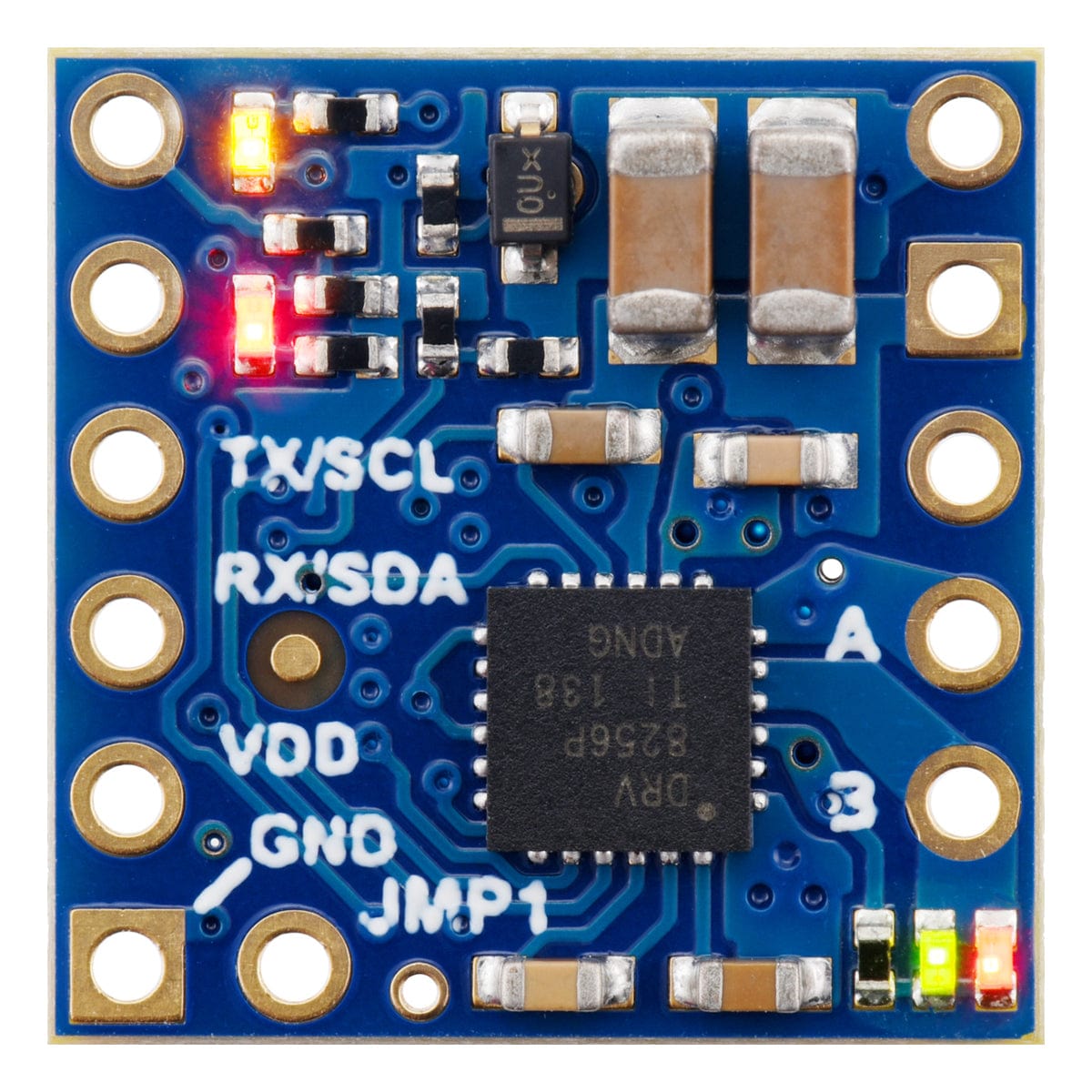
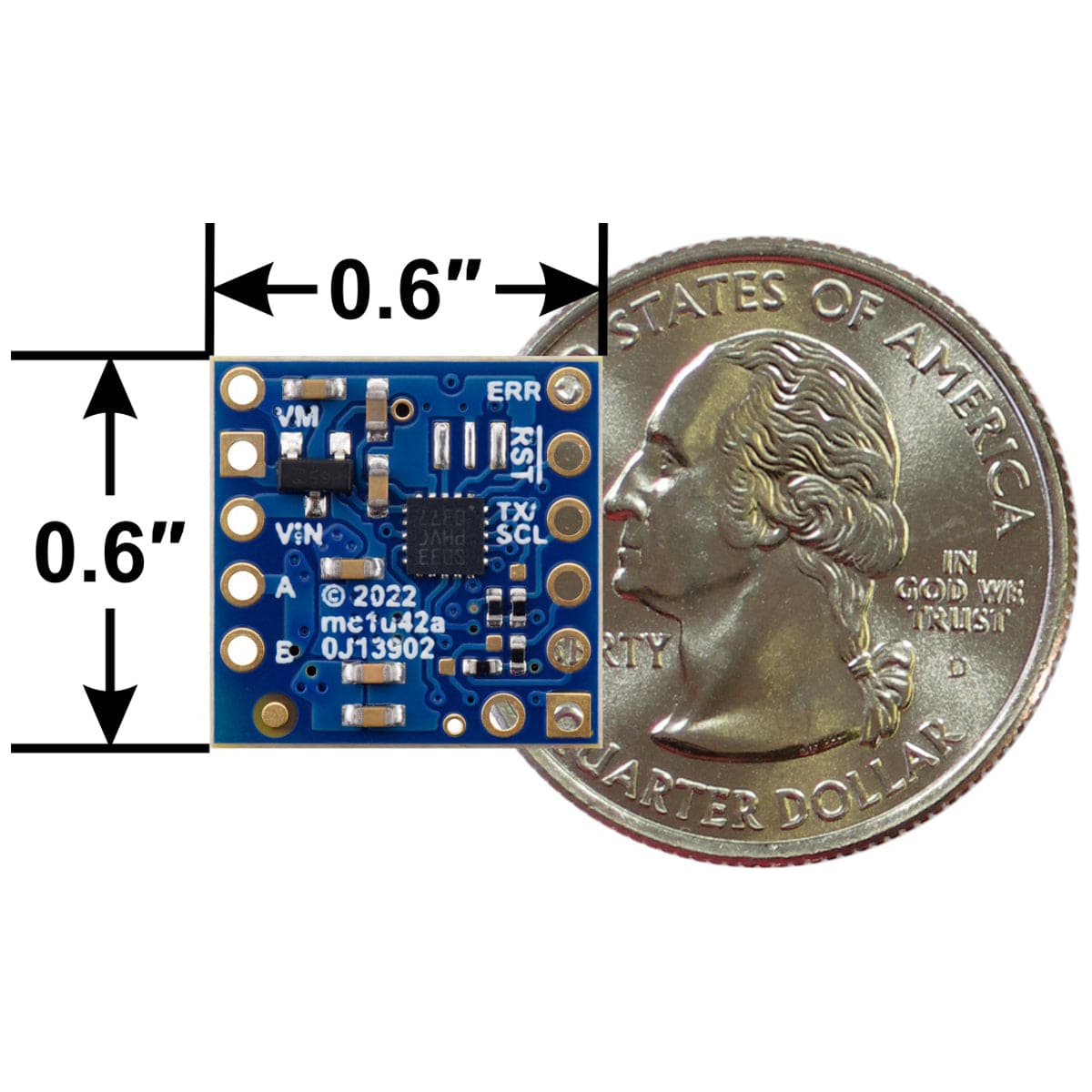
These compact (0.6″ × 0.6″) boards operate from 4.5V to 48V and can deliver continuous output currents up to 2.2A. Multiple Motoron controllers can be configured to work on a single I²C bus, allowing independent control of many motors.
Unlike most of our motor drivers, the Motoron does not require any PWM outputs or timers on your microcontroller. Instead, only a single I²C interface is needed regardless of how many Motorons you connect.
The M1T256 has an I²C interface, and this version ships with soldered headers. We also stock a dual-channel version.

| Channels | 1 |
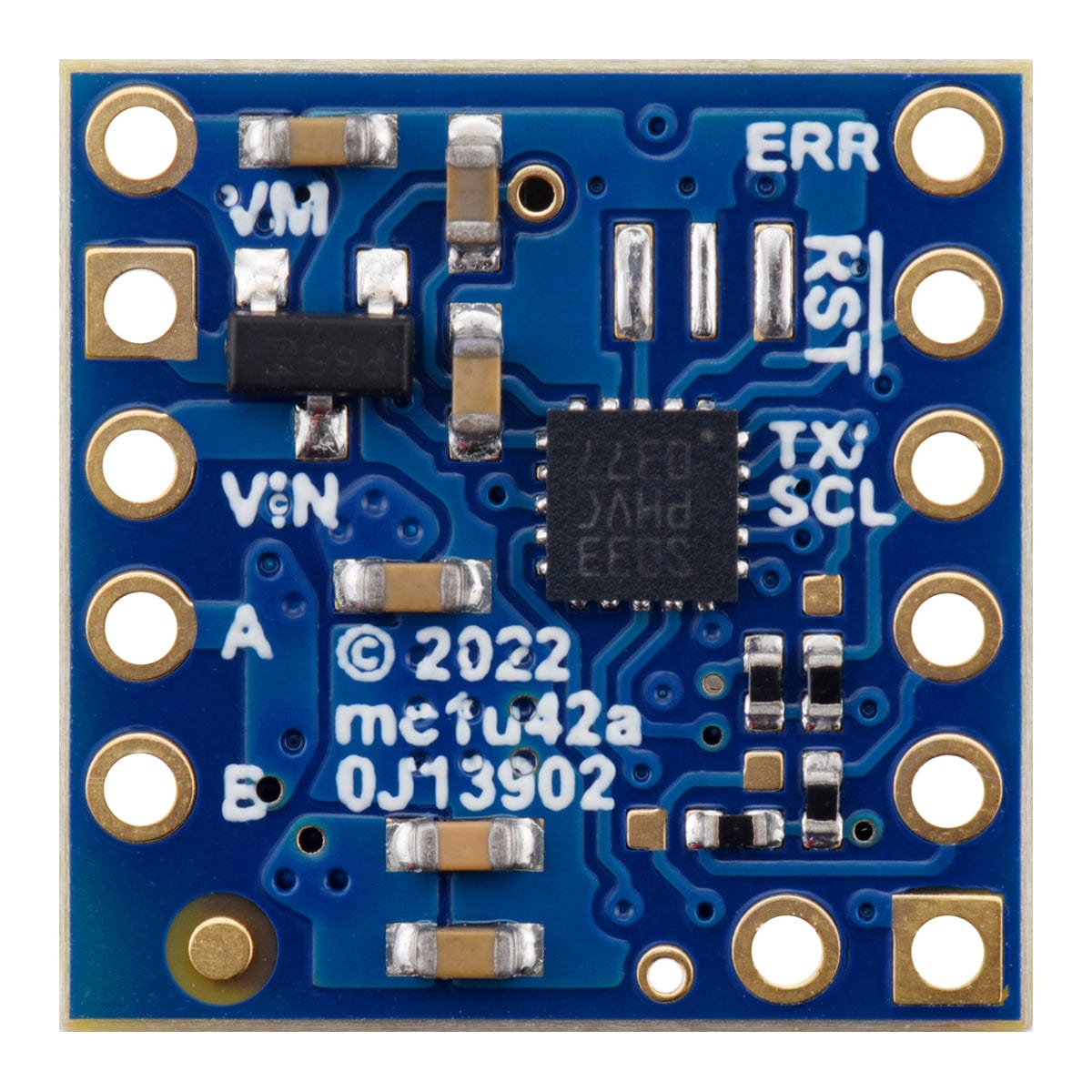
| Model | Motoron M1T256 |
| Control interface | I²C |
| Minimum operating voltage | 4.5 V |
| Maximum operating voltage | 48 V |
| Continuous output current per channel | 2.2 A |
| Peak output current per channel | 6.4 A |
| Reverse voltage protection? | Y |
| Header pins soldered? | Y |
| Size | 0.6″ × 0.6″ |
| Weight | 1.9 g |
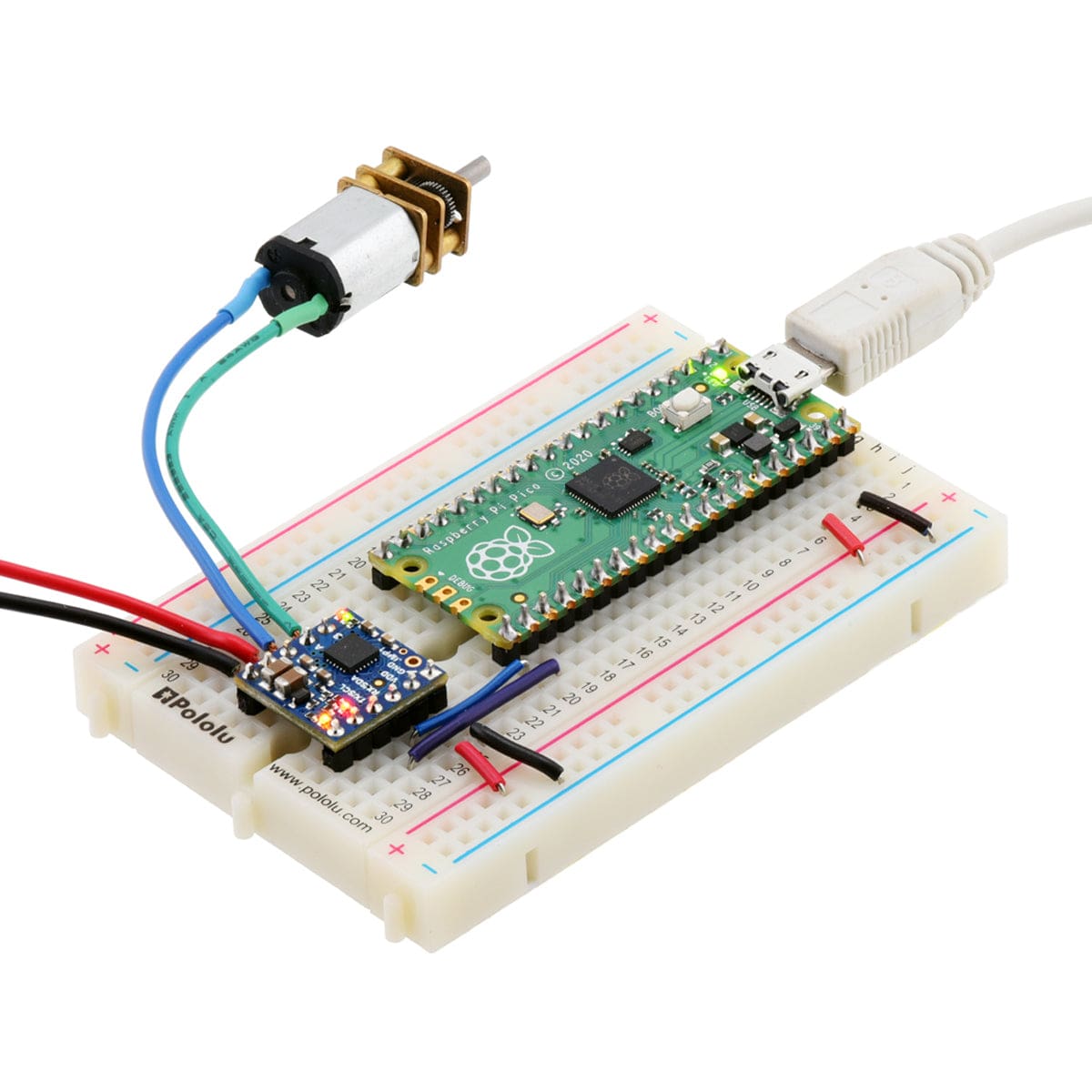
Raspberry Pi Pico, breadboard and motors not included
Your payment information is processed securely. We do not store credit card details nor have access to your credit card information.