Adafruit CAN Bus FeatherWing - MCP2515
Price:
Sale price
£12
Stock:
Quantity:
Login / Signup
Cart
Your cart is empty
CAN Bus is a small-scale networking standard, originally designed for cars and, yes, busses, but is now used for many robotics or sensor networks that need better range and addressing than I2C and don't have the pins or computational ability to talk on Ethernet. CAN is 2 wire differential, which means it's good for long distances and noisy environments.
Messages are sent at about 1Mbps rate - you set the frequency for the bus and then all 'joiners' must match it, and have an address before the packet so that each node can listen in to messages just for it. New nodes can be attached easily because they just need to connect to the two data lines anywhere in the shared network. Each CAN device sends messages whenever it wants, and thanks to some clever data encoding, can detect if there's a message collision and retransmit later.
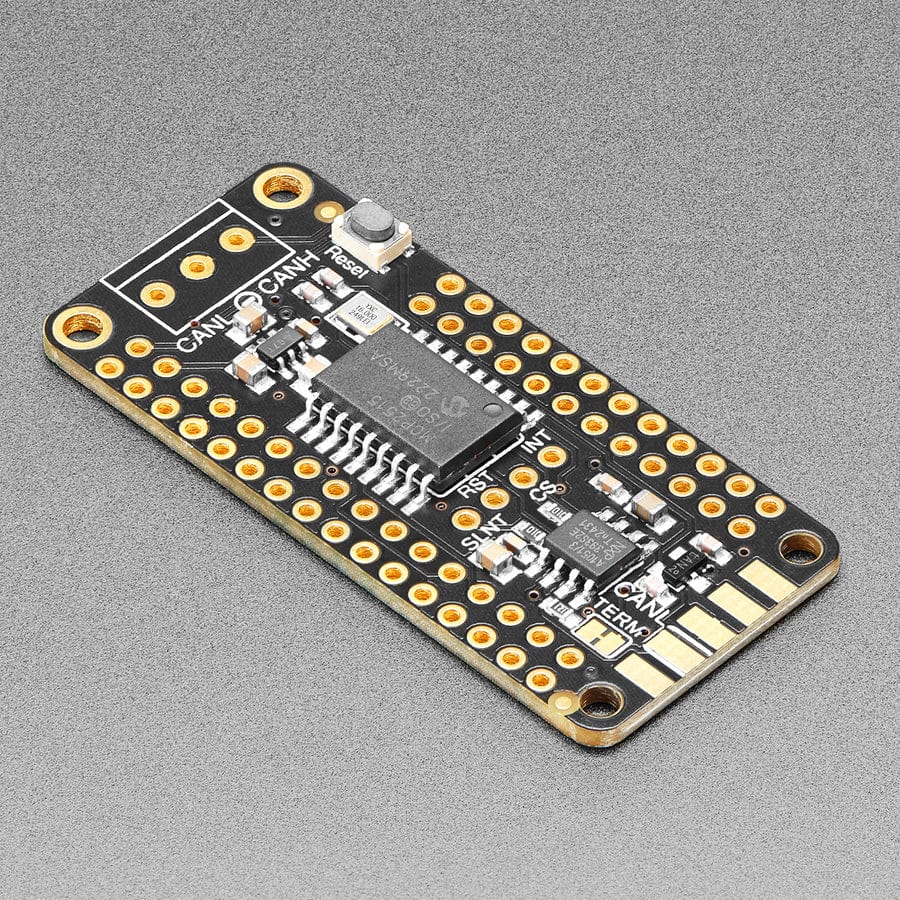
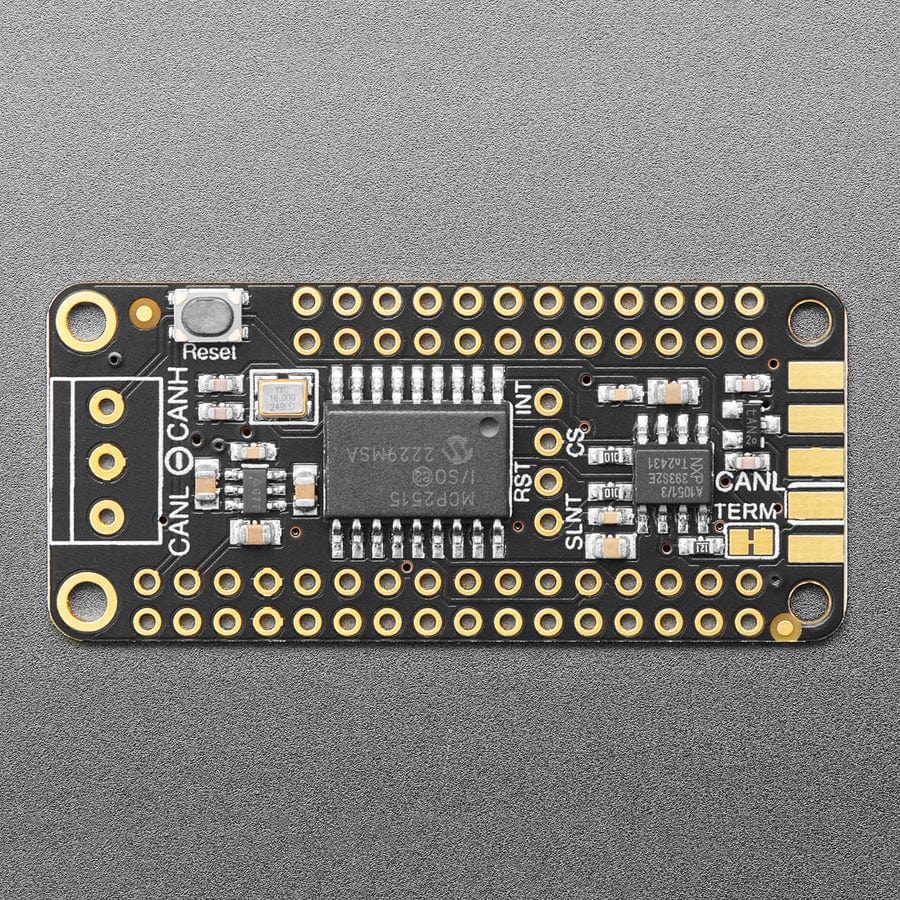
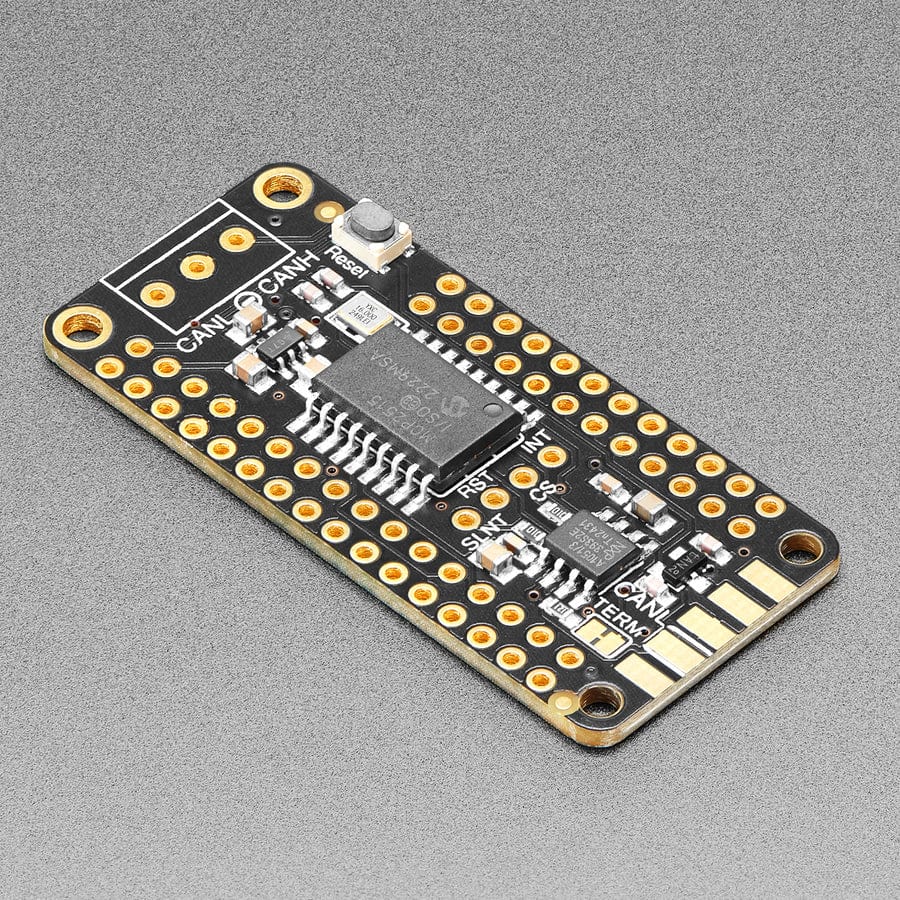
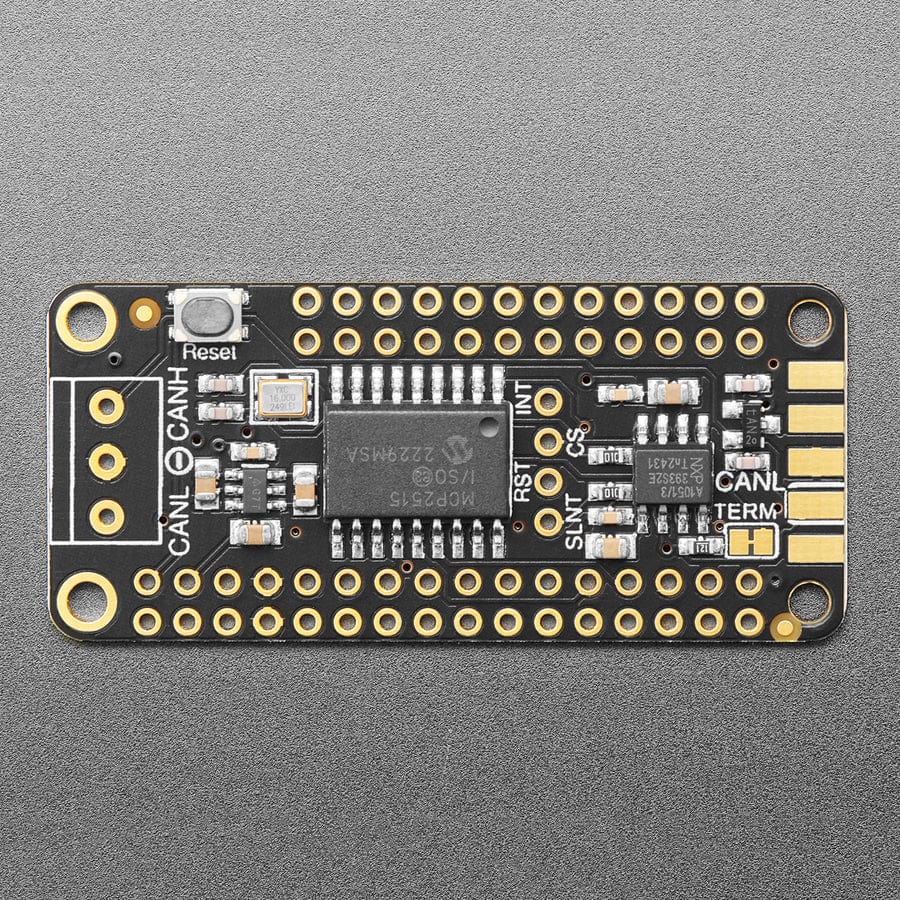
If you'd like to connect your Feather to a CAN Bus, the Adafruit CAN Bus FeatherWing with MCP2515 controller and TJA1051/3 transceiver will work with any and all Feathers! The controller is the MCP2515, an extremely popular and well-supported chipset with drivers in Arduino and CircuitPython and only requires an SPI port and two pins for chip-select and IRQ. Use it to send and receive messages in either standard or extended format at up to 1 Mbps.
We've added a few nice extras to this Feather to make it useful in many common CAN scenarios:
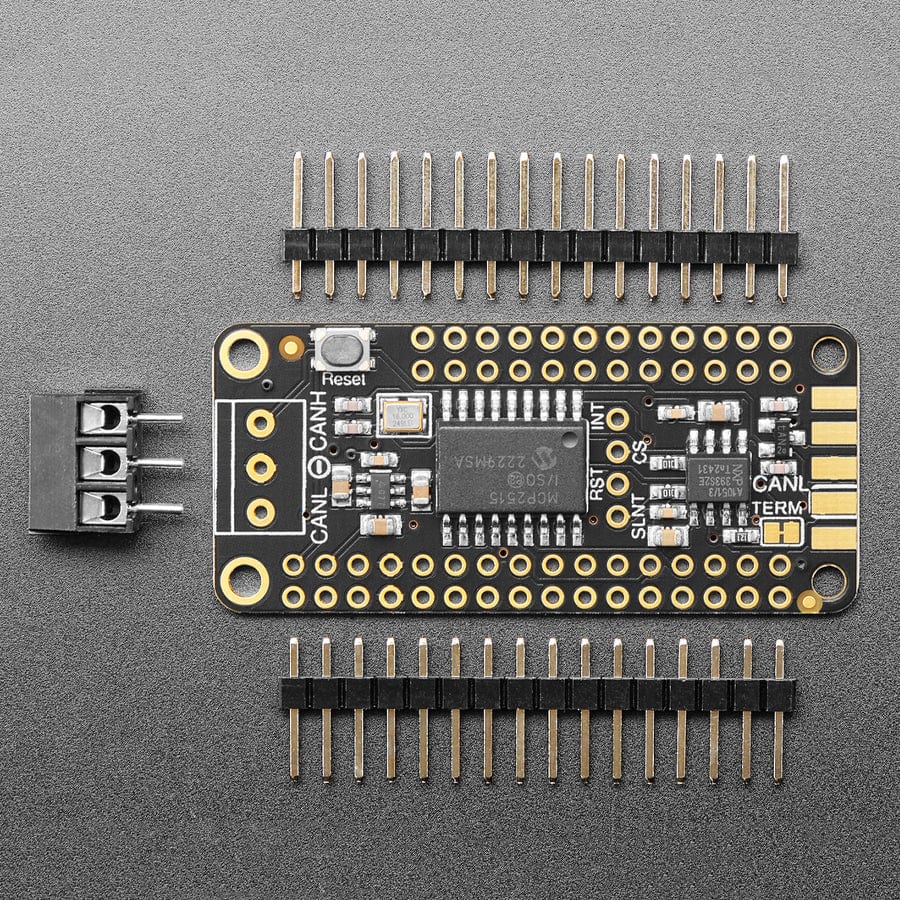
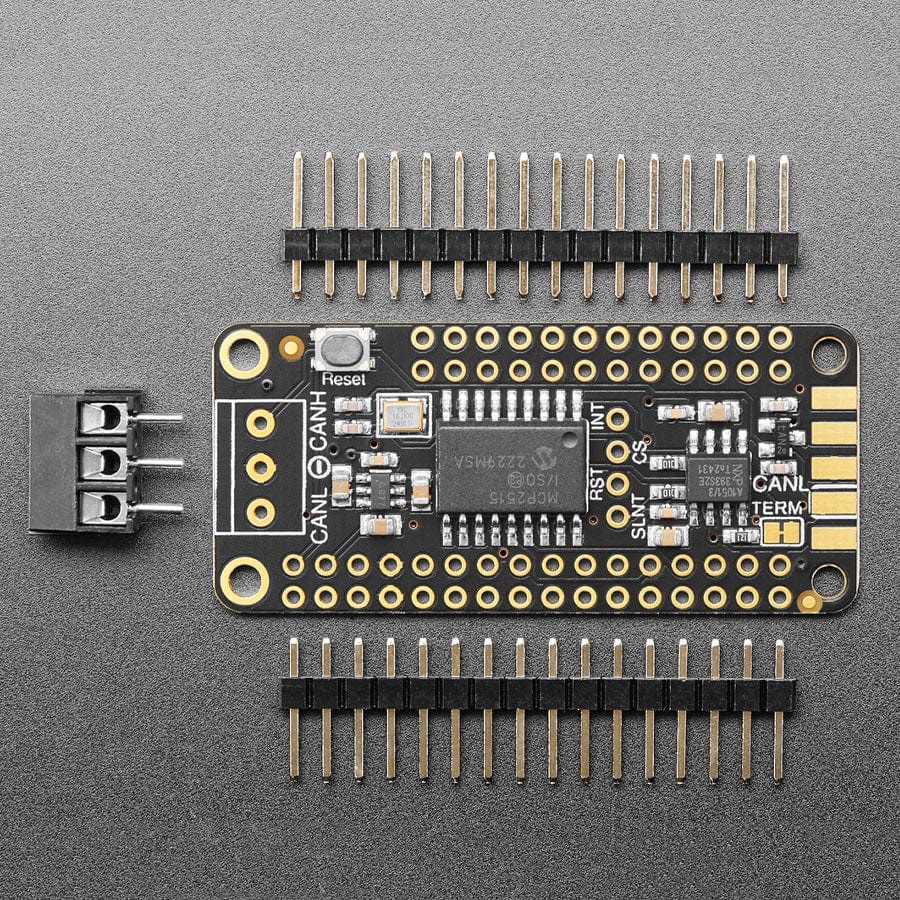
Each order comes with an assembled wing, terminal block and header. You will need to solder in the header yourself but it's a quick task.
Your payment information is processed securely. We do not store credit card details nor have access to your credit card information.