Zumo Robot for Arduino (Assembled with 75:1 HP Motors) [Discontinued]
Price:
Sale price
£115
 Skip to content
Skip to content
Login / Signup
Cart
Your cart is empty







The Pololu Zumo robot is an Arduino-controllable tracked robot platform that is less than 10 cm × 10 cm - small enough to qualify for Mini Sumo. It includes two micro metal gearmotors coupled to a pair of silicone tracks, a stainless steel bulldozer-style blade, an array of six infrared reflectance sensors for line following or edge detection, a 3-axis accelerometer / 3-axis magnetometer / 3-axis gyroscope, and a buzzer for simple sounds and music.
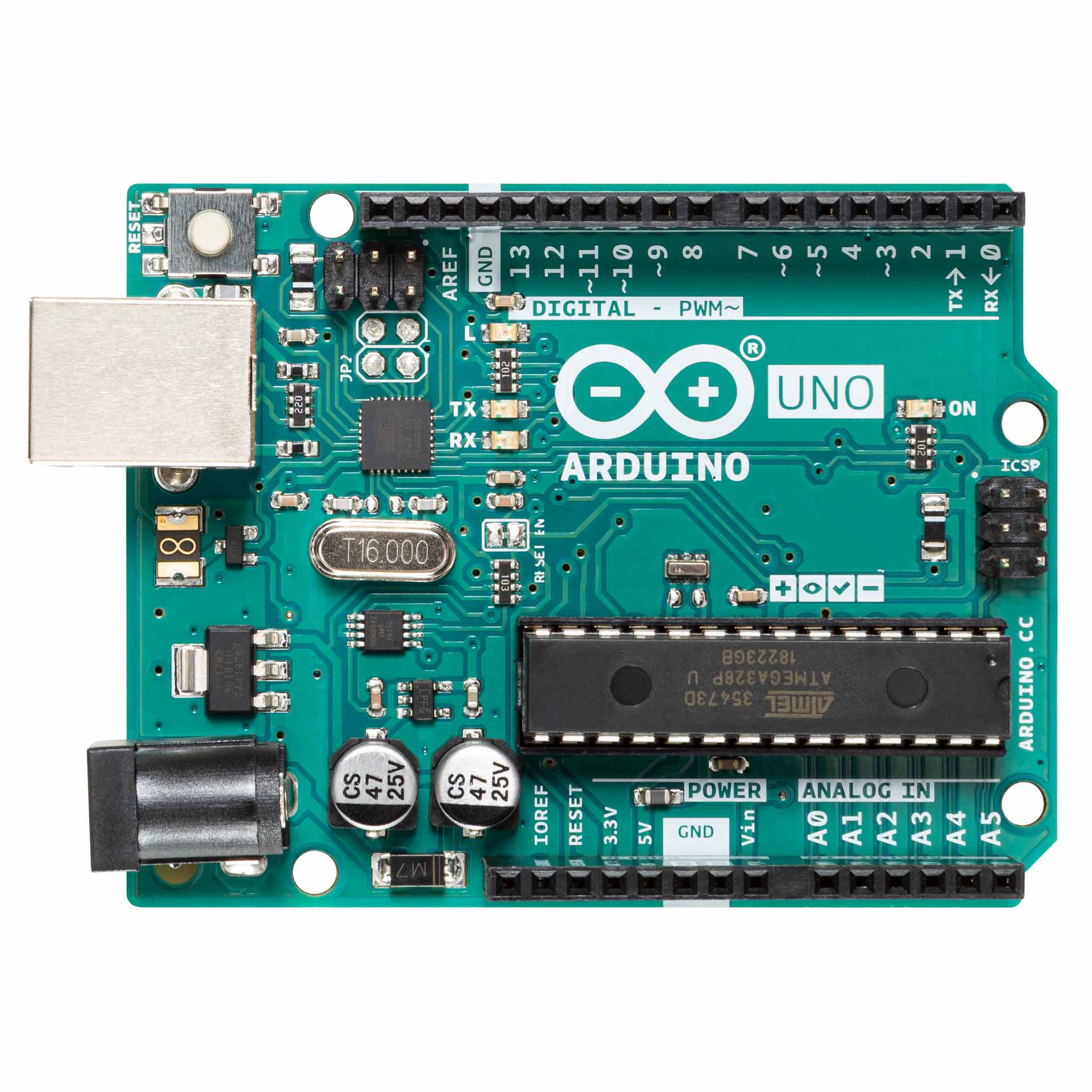
Just add 4x AA batteries and an Arduino (or compatible controller) and you are ready to push! No soldering or assembly is required.
The Zumo robot is a low-profile tracked robot platform intended for use with an Arduino (or compatible device) as its main controller. It measures less than 10 cm on each side and weighs approximately 300 g with an Arduino Uno and batteries (165 g without, as shipped), so it is both small enough and light enough to qualify for Mini-Sumo competitions. It uses two 10:12)
Your payment information is processed securely. We do not store credit card details nor have access to your credit card information.