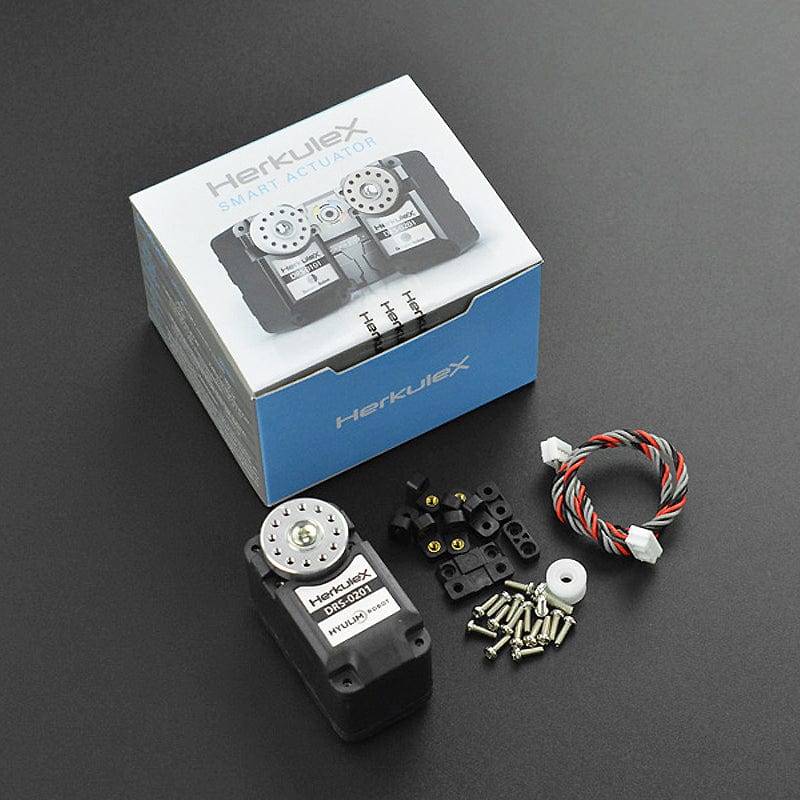
DRS - 0201 HerkuleX Smart Servo
Price:
Sale price
£157.80
Stock:
Quantity:
Login / Signup
Cart
Your cart is empty



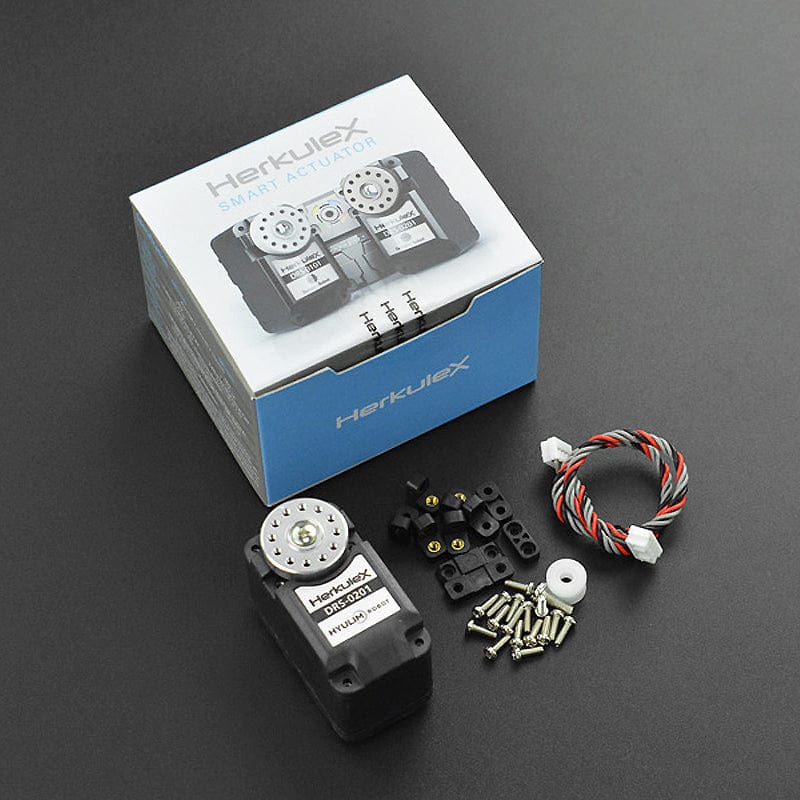
The Herkulex DRS-0201 is a state of the art modular smart servos incorporating motor, gear reducer, control circuitry and communications capability in one single package. Through metal brush coreless DC motor, it can provide torque up to 24kg/cm at 7.4v.
Equipped with a lot of adapting pieces including Horn, Horn Bolt(BHT 2.6X8), Wheel Horn Bushing, Wheel Horn Washer, Wheel Horn Bolt(PHM 3X8), Cable Guard, I-type Joint, L-type Joint, L-type Joint(Single Nut), Bracket Bolt(PHM 2X5), Joint Bolt(PHM 2X5), Wire Harness(200mm) and with its amazing structure, DRS-0201 is extremely easy to assemble. Two connectors attached to each servo allows serial connection as well as a parallel connection if required.
It carries different Control Algorithms like PID, Feedforward, Trapezoidal Velocity Profile so on and so forth, which makes the movement smoothly and precisely. By Using UART Serial communications, we can lightly change the speed, position, LED, operational compliance, stop and operational status of up to 254 servos simultaneously at once. Meanwhile, we can get feedback such as internal temperature, position, and overload sensors.
Servos are capable of diagnosing seven different types of errors which are then indicated by the LED. And we can directly control the RGB of the LED for diagnostics and decorative purposes. It's especially suitable for mechanical arms, robots, joints and etc.
Your payment information is processed securely. We do not store credit card details nor have access to your credit card information.