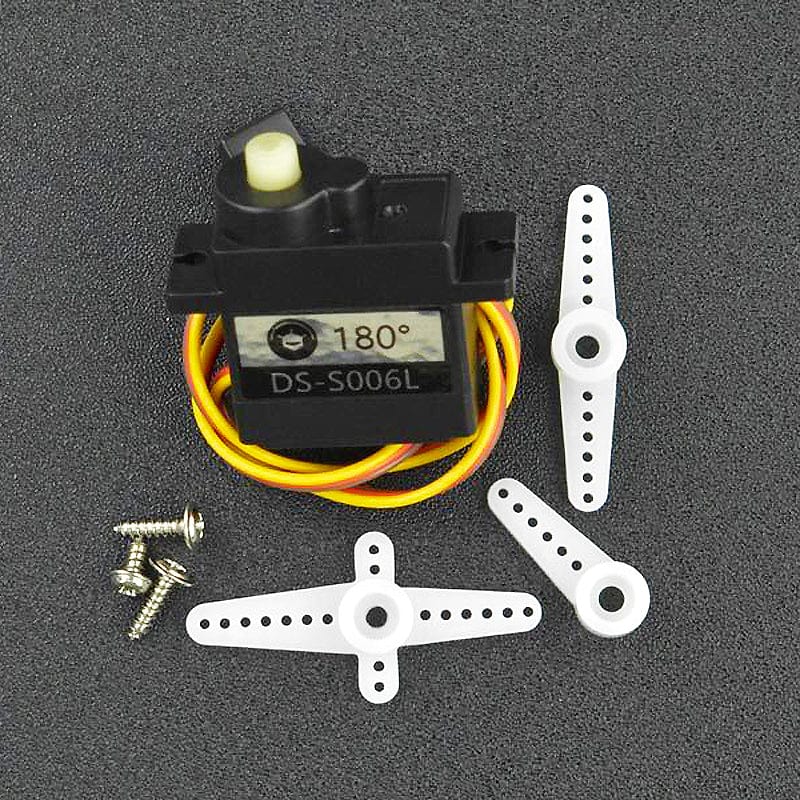
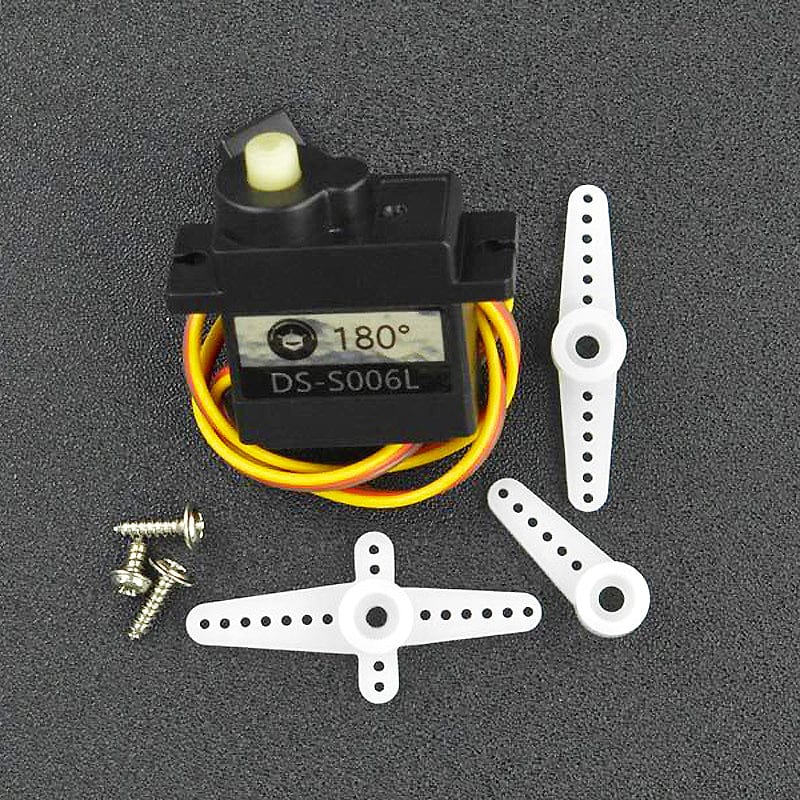
9g 180° Clutch Servo
Price:
Sale price
£4.80
Stock:
Quantity:
Login / Signup
Cart
Your cart is empty



When a servo is operated under complex circumstances such as robot and model, it may get stuck, burned or damaged due to external forces, which could bother you a lot...
Now DFRobot is launching a series of servos with a clutch function and electronic protection that can solve your problems perfectly.
When the angle of a servo is changed by external forces during normal operation, the servo can automatically reset and continue working through the clutch function, which prevents it from being damaged.
After being blocked for 5 seconds, the servo will automatically turn off its power to avoid getting burned.

This servo features large torque, stable performance, accurate running angle, and is easy to install. The operating voltage is 4.8~6V. When the servo is powered at 6V, its stall torque will exceed 1.2 kg. There are no limited switches inside the servo so it can rotate smoothly at 180 degrees (manually only). Meanwhile, the servo could operate fluently with minimal power, and you can just supply power to it by a normal battery or USB. In addition, users can directly control the servo using servo libraries in Arduino IDE and let it reach a maximum 180 degrees rotation angle within the pulse range of 500-2500μsec.

| Model | 6kg 180° | 6kg 300° | 9g 180° | 9g 300° | 2kg 180° | 2kg 300° | |
| SKU | SER0051 | SER0057 | SER0049 | SER0053 | SER0050 | SER0056 | |
| Operating Voltage | 4.8-6VDC | 4.8-6V DC | 4.8-6V DC | 4.8-6V DC | 4.8-6V DC | 4.8-6V DC | |
| Quiescent Current | ≤10mA at 6.0V | ≤10mA at 6.0V | ≤8mA at 6.0V | ≤8mA at 6.0V | ≤8mA at 6.0V | ≤8mA at 6.0V | |
| No-load Current | ≤60mA at 6.0V | ≤60mA at 6.0V |
≤50mA at 4.8V |
≤50mA at 4.8V |
≤110mA at 4.8V |
≤110mA at 4.8V |
|
|
≤60mA at 6.0V |
≤60mA at 6.0V |
≤120mA at 6.0V |
≤120mA at 6.0V |
||||
| Stall Current | ≤1.65A at 6.0V | ≤1.65A at 6.0V |
≤550mA at 4.8V |
≤550mA at 4.8V |
≤700mA at 4.8V |
≤700mA at 4.8V |
|
|
≤650mA at 6.0V |
≤650mA at 6.0V |
≤800mA at 6.0V |
≤800mA at 6.0V |
||||
| Rated Torque | ≥4.4kg.com at 6.0V | ≥4.4kg.com at 6.0V |
≥0.32kgf·cm at 4.8V |
≥0.32kgf·cm at 4.8V |
≥0.45kgf·cm at 4.8V |
≥0.45kgf·cm at 4.8V |
|
|
≤0.4kgf·cm at 6.0V |
≤0.4kgf·cm at 6.0V |
≥0.55kgf·cm at 6.0V |
≥0.55kgf·cm at 6.0V |
||||
| Stall Torque | ≥6kg·cm at 6.0V | ≥6kg·cm at 6.0V |
≥1.0kgf·cm at 4.8V |
≥1.0kgf·cm at 4.8V |
≥1.6kgf·cm at 4.8V |
≥1.6kgf·cm at 4.8V |
|
|
≤1.2kgf·cm at 6.0V |
≤1.2kgf·cm at 6.0V |
≥2.0kgf·cm at 6.0V |
≥2.0kgf·cm at 6.0V |
||||
| Operating Angle | 180°±10° | 300°±10° | 180°±10° | 300°±10° | 180°±10° | 300°±10° | |
| Pulse Width Range | 500~2500μs | 500~2500μs | 500~2500μs | 500~2500μs | 500~2500μs | 500~2500μs | |
| Communication Mode | PWM | PWM | PWM | PWM | PWM | PWM | |
Your payment information is processed securely. We do not store credit card details nor have access to your credit card information.