Pololu Baby Orangutan B-328 Robot Controller
Price:
Sale price
£23.80
Stock:
Quantity:
 Skip to content
Skip to content
Login / Signup
Cart
Your cart is empty
The Baby Orangutan B-328 is a very compact but complete robot controller, packing a high-performance ATmega328P AVR microcontroller (with 32 KB of program memory and 2 KB of RAM) and two motor drive channels in the same 24-pin form factor as competing units that include just a microcontroller.
You can connect your battery, sensors, and motors directly to this small module to make a miniature robot, or you can use the Baby Orangutan as an auxiliary controller in larger robots.
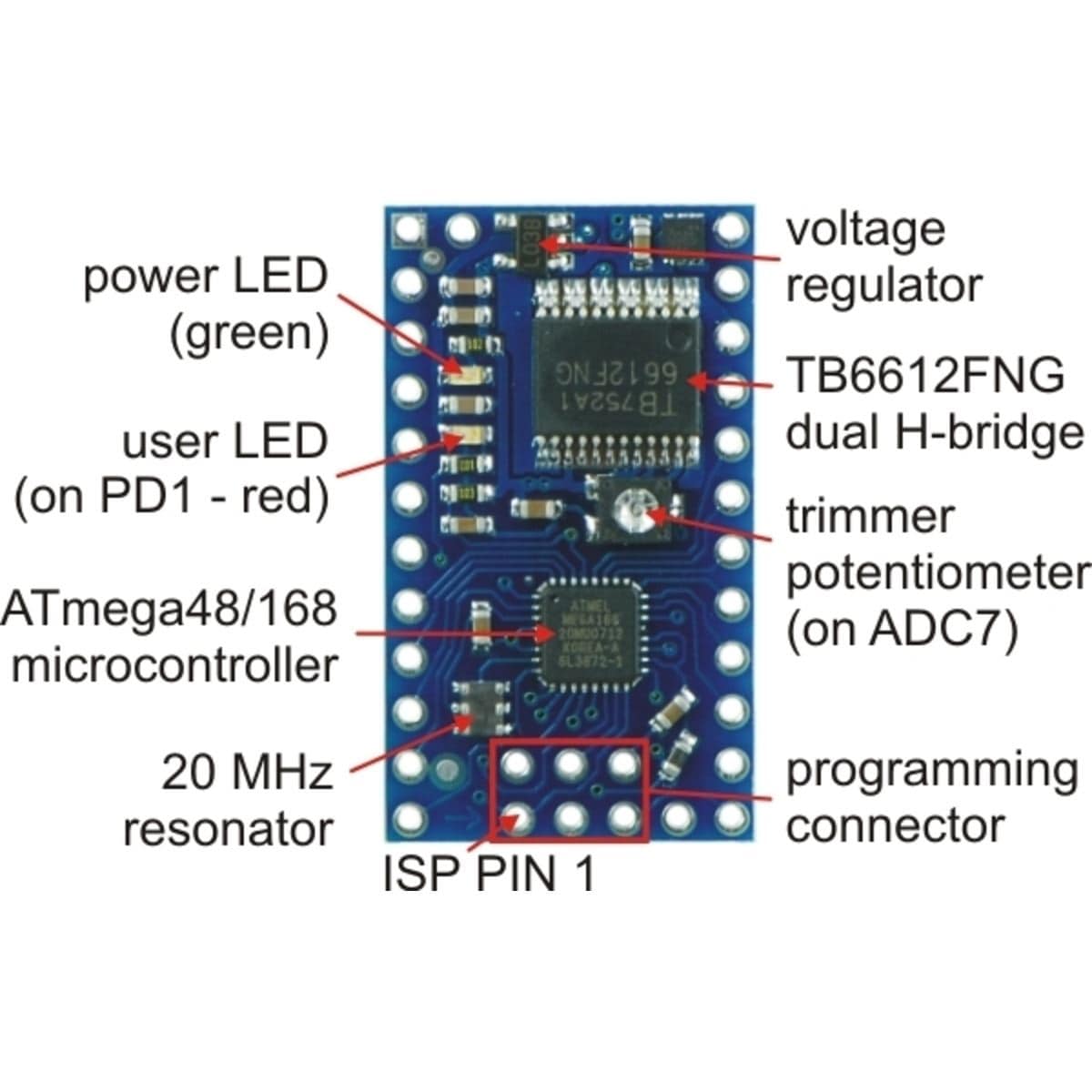
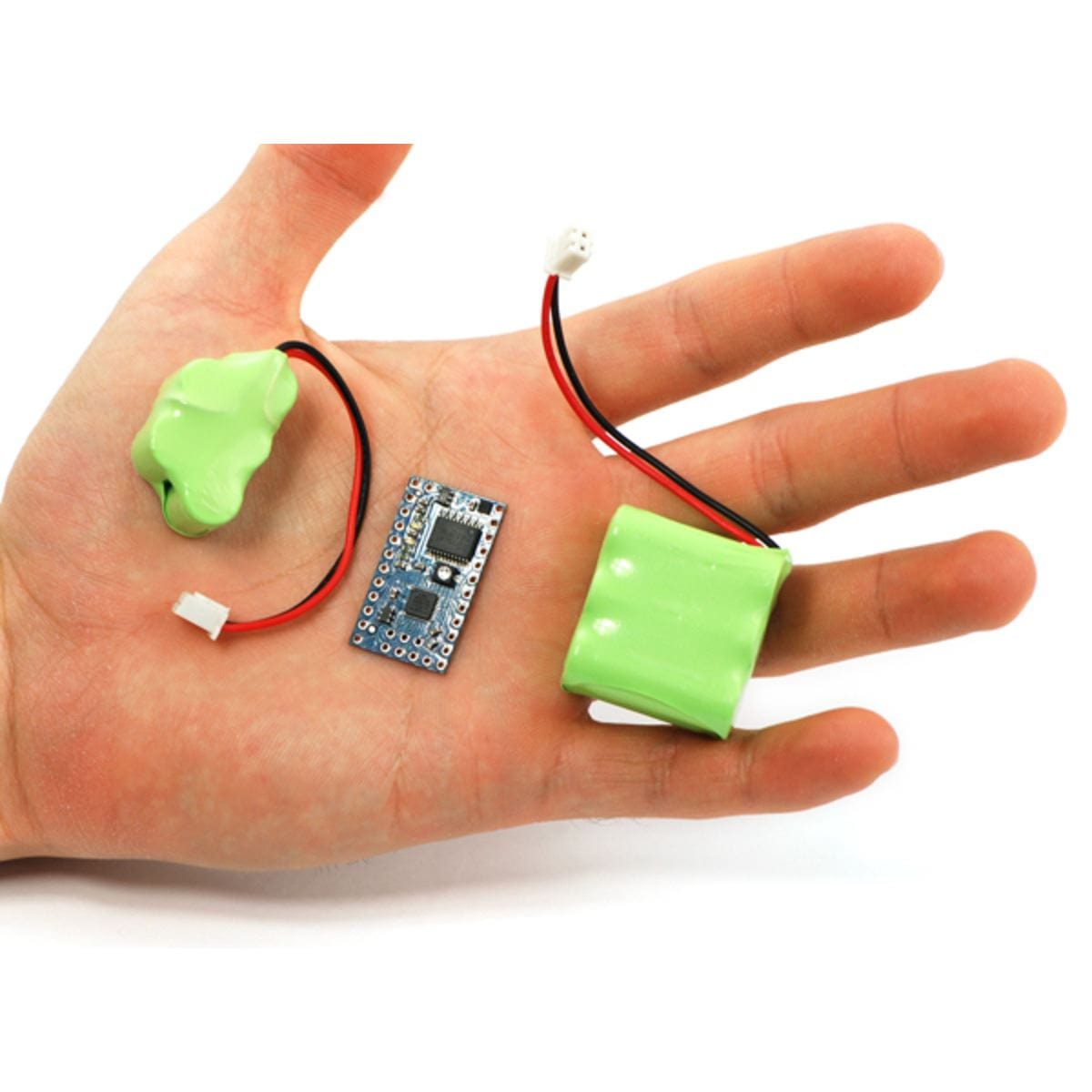
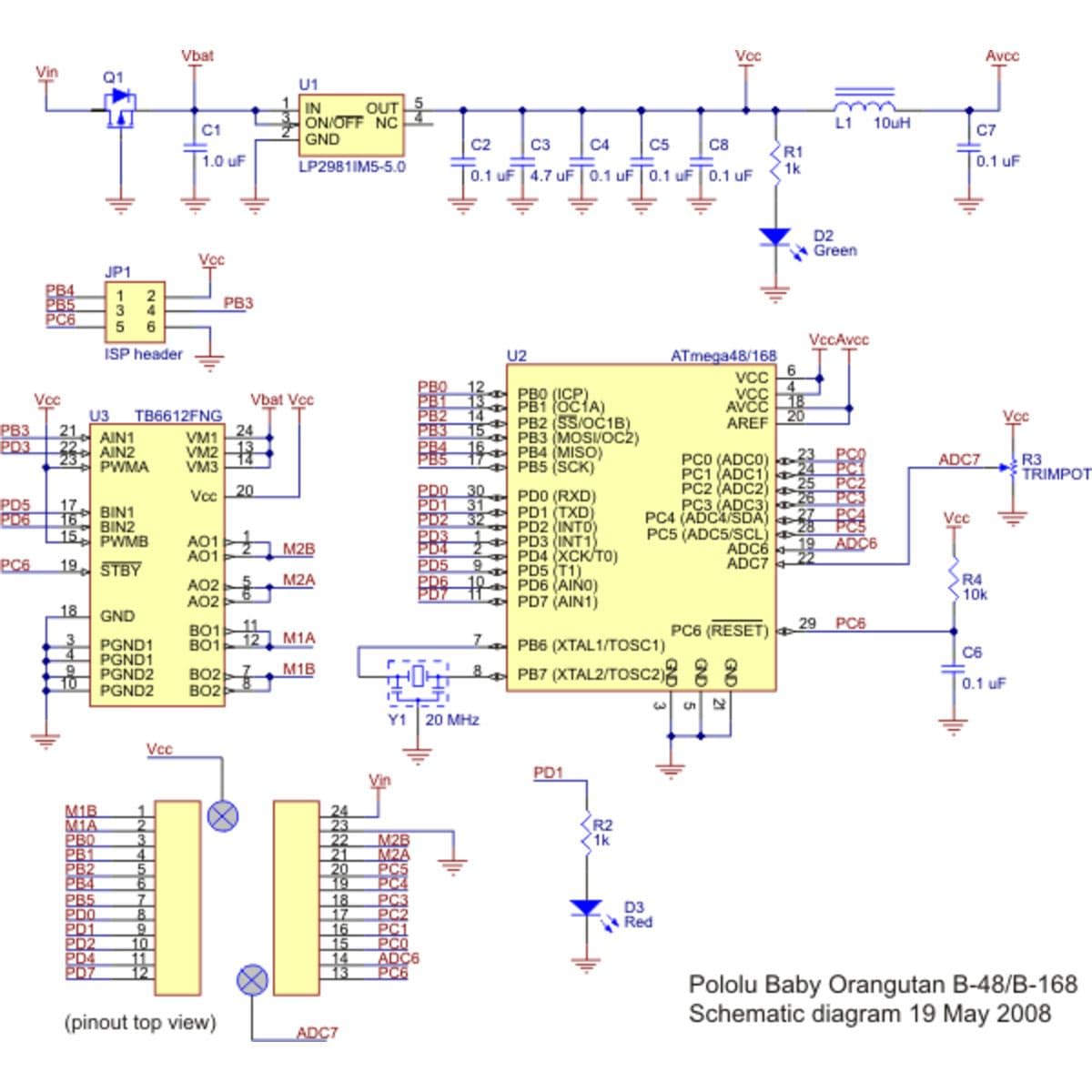
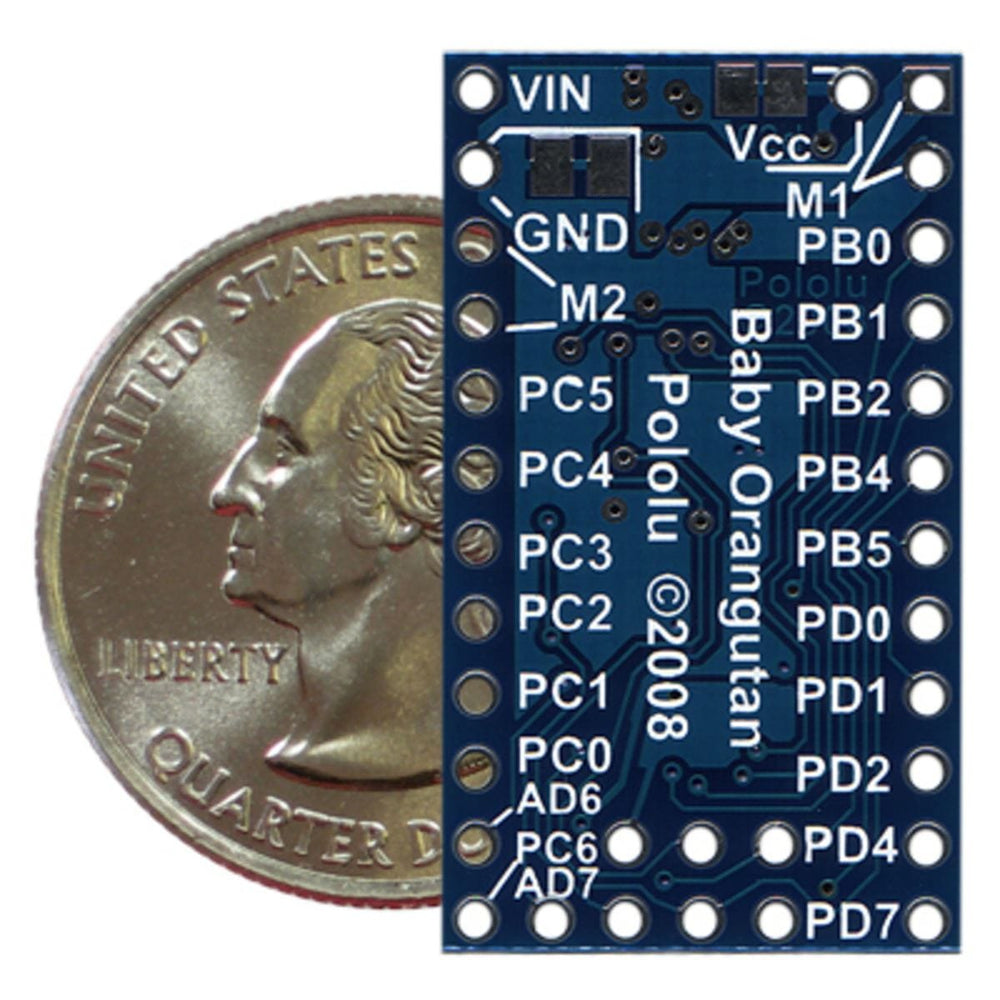
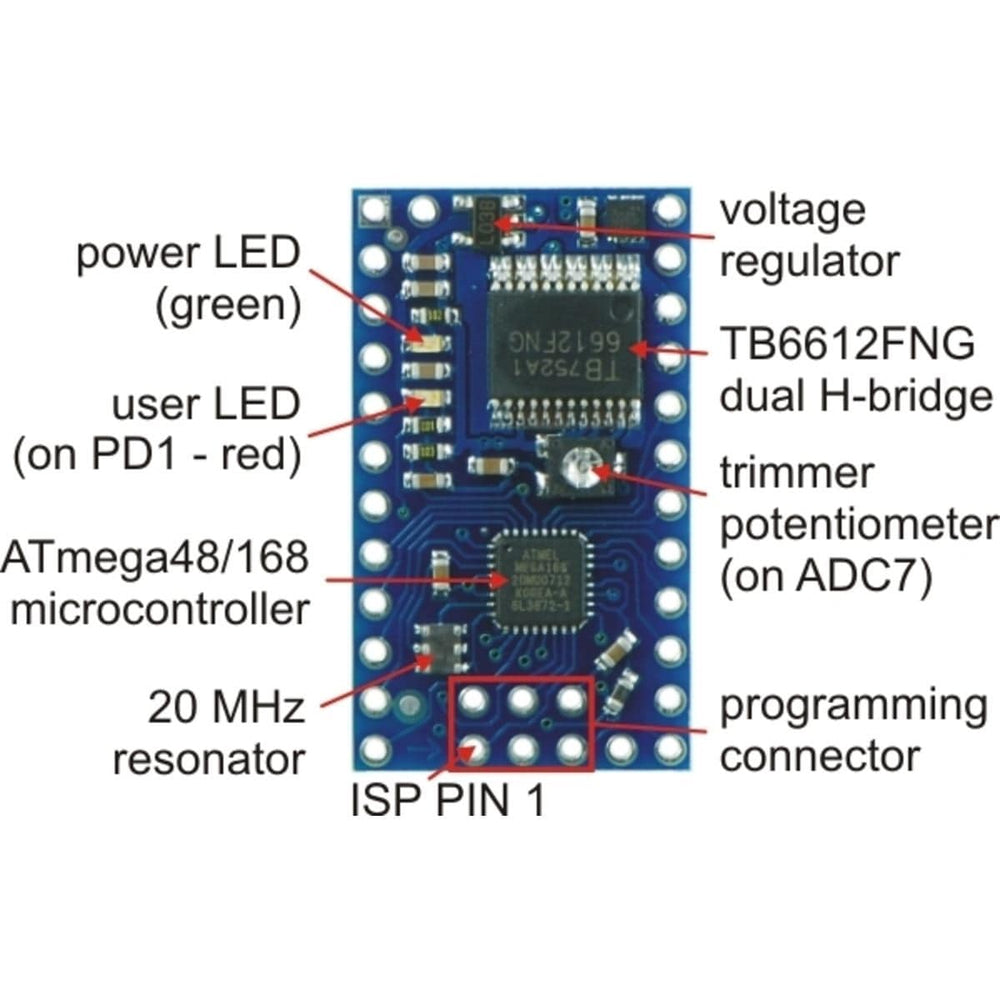
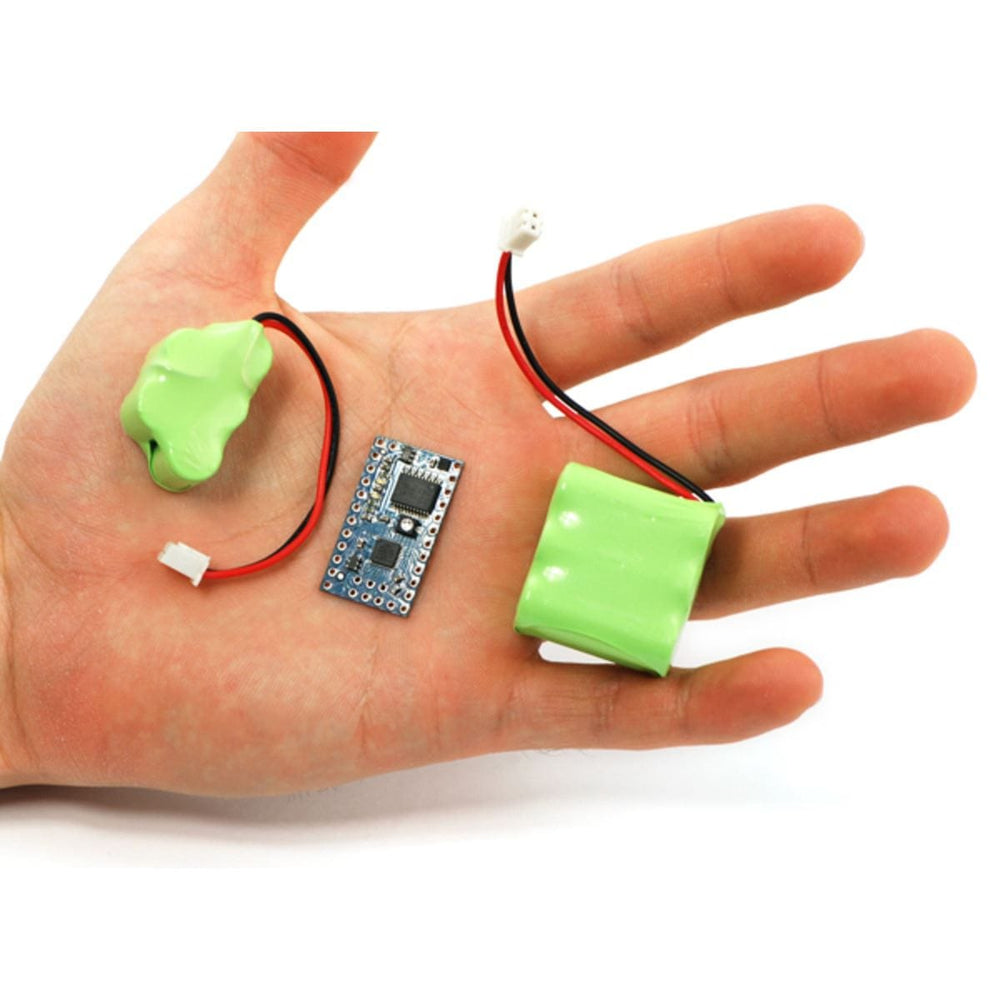
The Baby Orangutan is a complete control solution for small robots, all packed into a tiny 1.2" x 0.7" 24-pin DIP package. Its compact design eliminates bulkier components such as the LCD and switches while retaining the most essential features of the Orangutan robot controller line: a programmable ATmega328P AVR microcontroller and a dual H-bridge for direct control of two DC motors. This integrated motor driver sets the Baby Orangutan B-328 apart from similarly-sized microcontroller boards from other manufacturers. Two on-board indicator LEDs, a trimmer potentiometer, a 20 MHz resonator, and reverse battery protection round out the basic hardware features of the Baby Orangutan.
The removal of the larger Orangutan components also allows for a significantly improved manufacturing process that allows Pololu to offer the Baby Orangutan at a very affordable price. Because the Orangutans are based on Atmel’s powerful AVR microcontrollers, the Orangutans deliver significantly higher performance than other similar controller boards. The availability of free development software, such as the Atmel Studio IDE and the WinAVR GCC C/C++ compiler, and low-cost programmers, such as the Pololu USB AVR Programmer v2.1, make the Baby Orangutan B-328 a truly outstanding value.
For those not necessarily interested in robotics, the Baby Orangutan is also a great introduction to the AVR microcontrollers because of its size and price. All you need to get started is a low-cost programmer and a power source. You can fit a substantial design even on a small breadboard since you won’t need the space for basic components such as the voltage regulator and resonator. The source code for several sample projects is available in the Pololu resources section, these examples are intended to help you get up and running quickly with your new AVR-based controller.
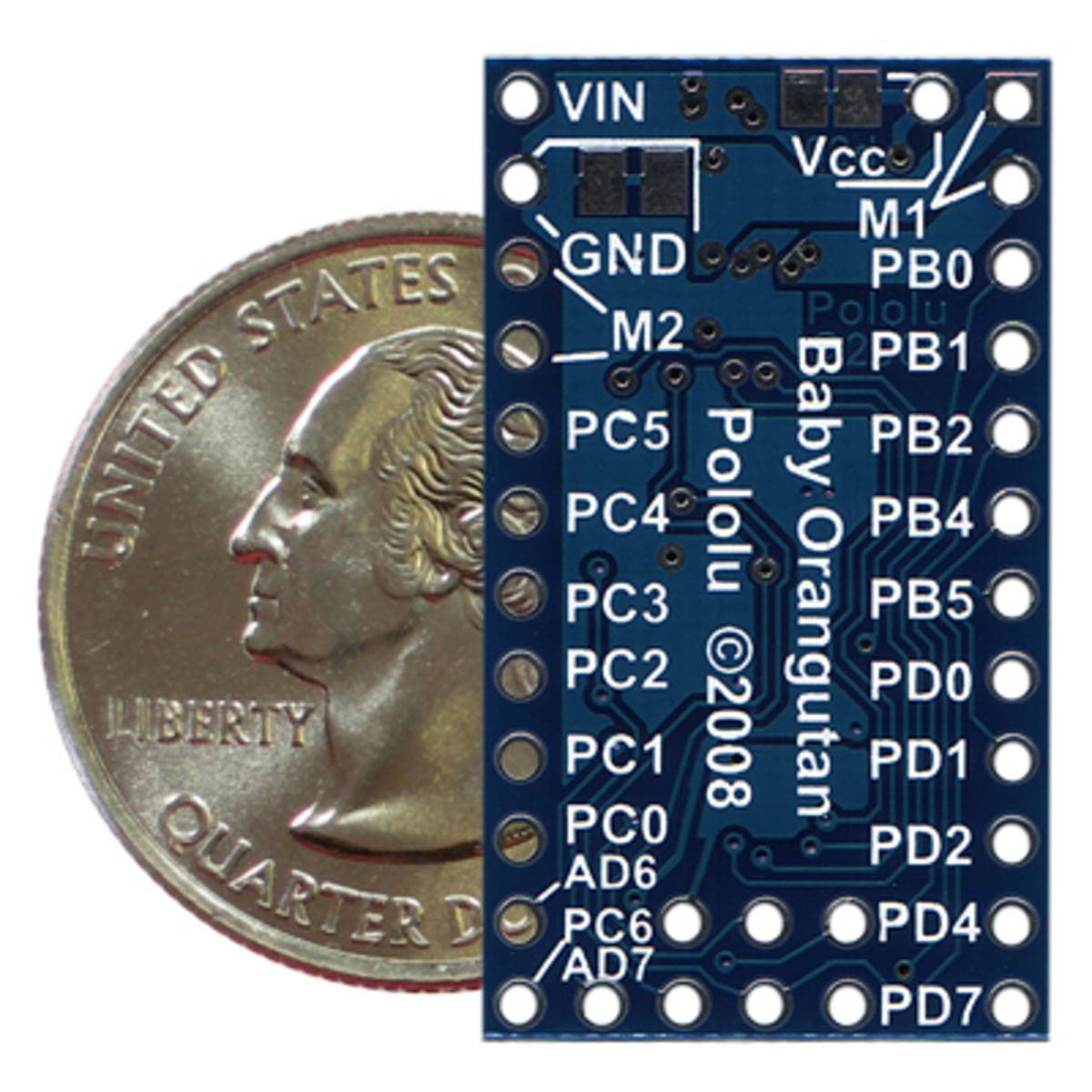
The compact module can be used as a DIP component on breadboards or prototyping boards, or the pin-less versions can be used for space-constrained installations in miniature robots.
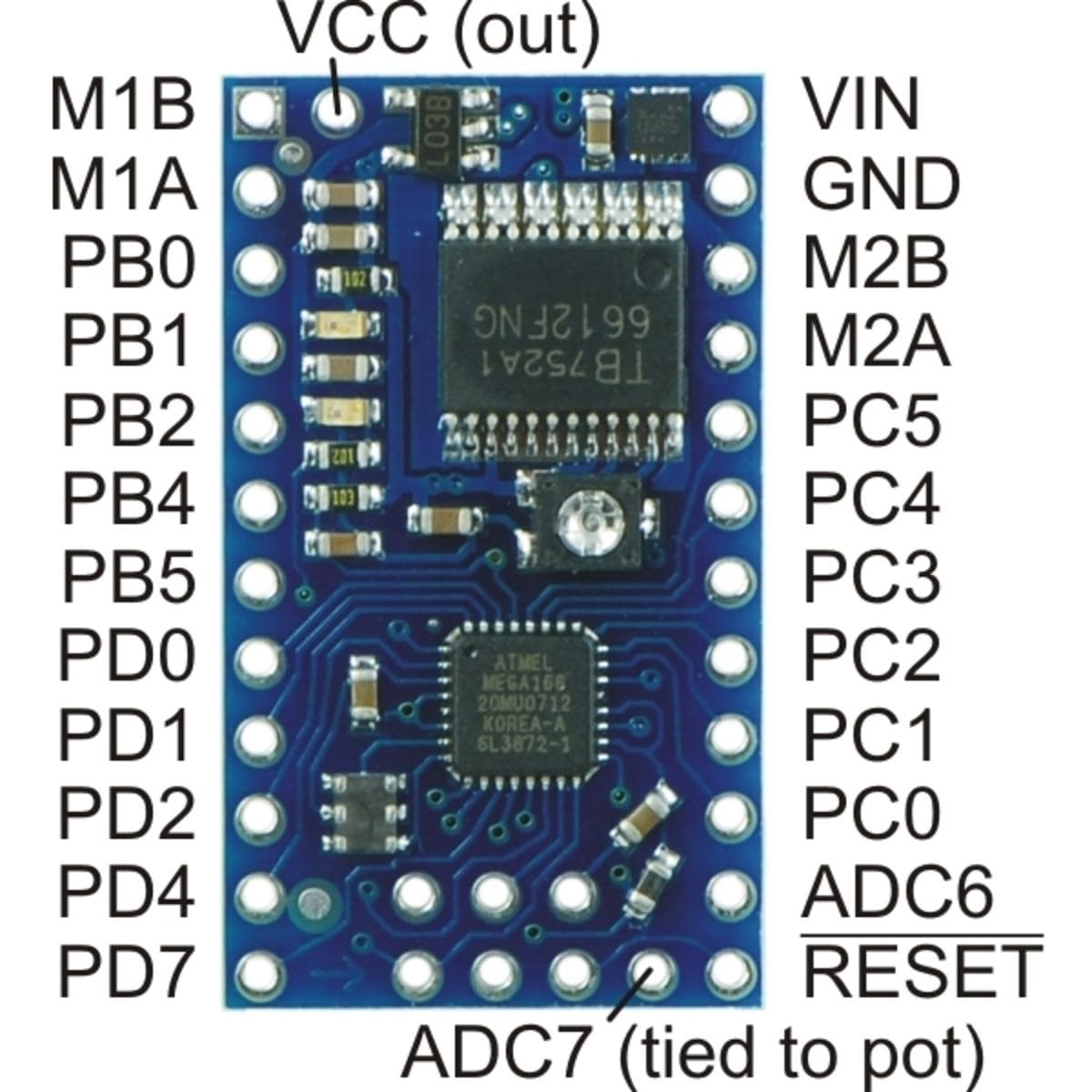
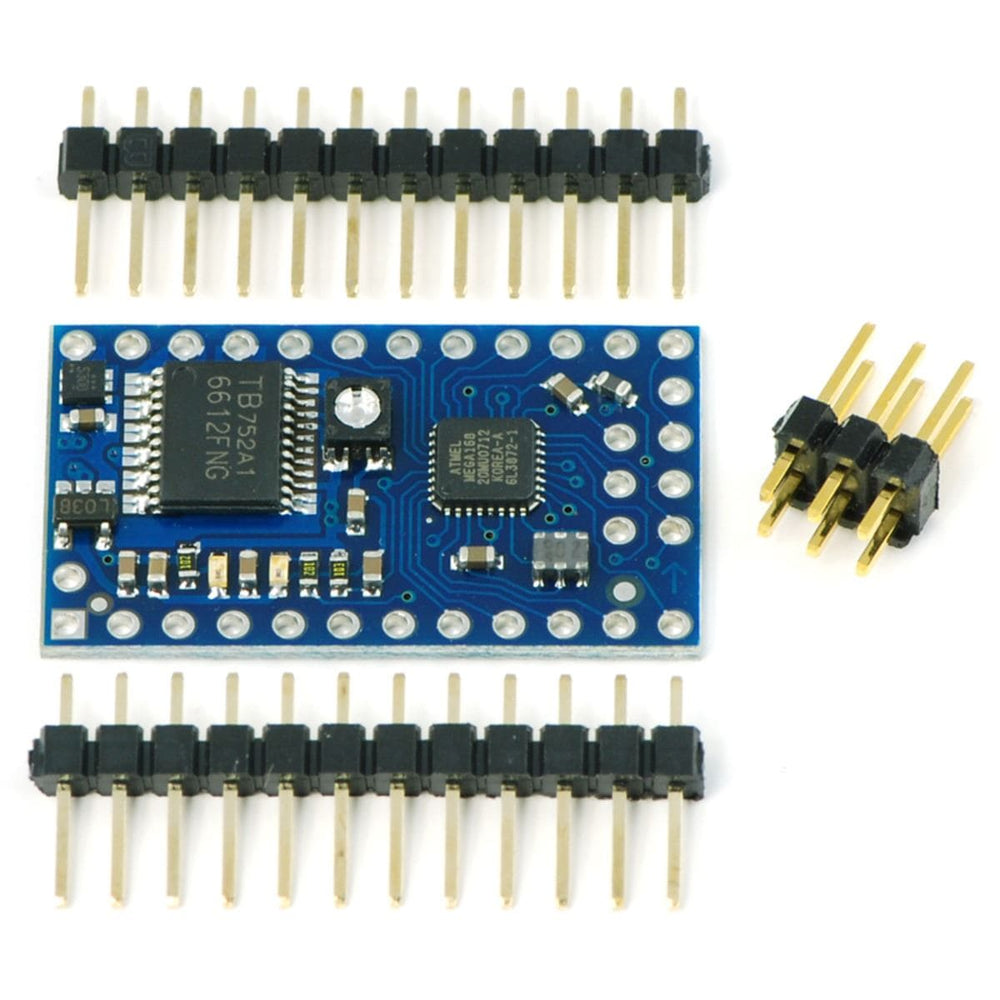
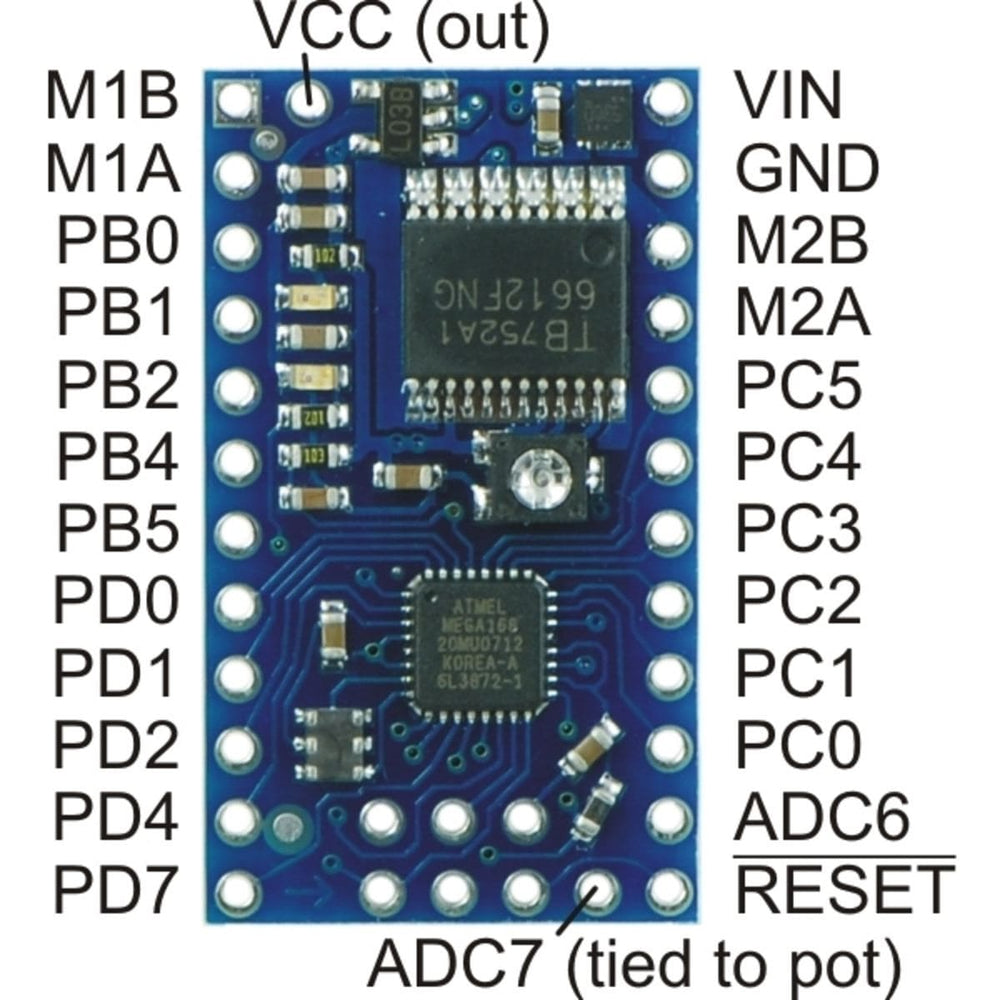
The 0.1″ header pins are included with the Baby Orangutan but are not soldered in. Power pins, one of the motor outputs, and several I/O lines are all accessible from one side to enable use of the Baby Orangutan as a single in-line pin (SIP) package for applications that do not require all of the I/O lines.
The small size and low cost of the Baby Orangutan make it a perfect option for primary control of small robots or for auxiliary control on larger robots.
| Processor: | ATmega328P @ 20 MHz |
| RAM size: | 2048 bytes |
| Program memory size: | 32 Kbytes |
| Motor driver: | TB6612FNG |
| Motor channels: | 2 |
| User I/O lines: | 18* |
| Max current on a single I/O: | 40 mA |
| Minimum operating voltage: | 5 V |
| Maximum operating voltage: | 13.5 V |
| Continuous output current per channel: | 1A |
| Peak output current per channel: | 3A |
| Maximum PWM frequency: | 80 kHz |
| Reverse voltage protection?: | Y |
| External programmer required?: | Y |
| LCD included?: | N |
| Size: | 1.20" x 0.70" |
| Weight (without headers) | 1.5g |
* 16 can be used as digital I/Os and 8 can be used as analog inputs.
Your payment information is processed securely. We do not store credit card details nor have access to your credit card information.